Hi all,
I’m having an odd issue where I can arm my uav, pixracer w/ latest stable PX4, but it doesn’t react to any-other manual control inputs. I can see in the radio tab that they are indeed getting to the vehicle, but it does not react at all. Yesterday I had this issue a few times but was able to power cycle and regain control. Today I cannot get it to respond. I get no errors but am getting ‘takeoff detected’ and ‘landing detected’ Might that be causing my issue? I made no parameter changes except for the PIDs which I am trying to tune. Any help would be greatly appreciated as this makes no sense to me. Thanks in advance,
It may also be of note that even when disarmed and sitting on the concrete floor, esp8266 wifi connection, i constantly get the greyed our QGroundControl “Disabled while in flight” message.
New development, it arms itself randomly, and my transmitter cannot disarm it. Note, i cant still see in QGC that the stick inputs are being registered.
I came across this https://github.com/PX4/Firmware/issues/12251 where others seem to have similar issues. I’m thinking it has to do with the auto landing/takeoff detection, not sure how but those messages never flooded in like they are and I’ve never had this issue before. I’ve reverted to older firmware and the issue is gone but would like to figure out what caused it, and why not everyone is affected.
Jake
That’s odd, thanks for raising this.
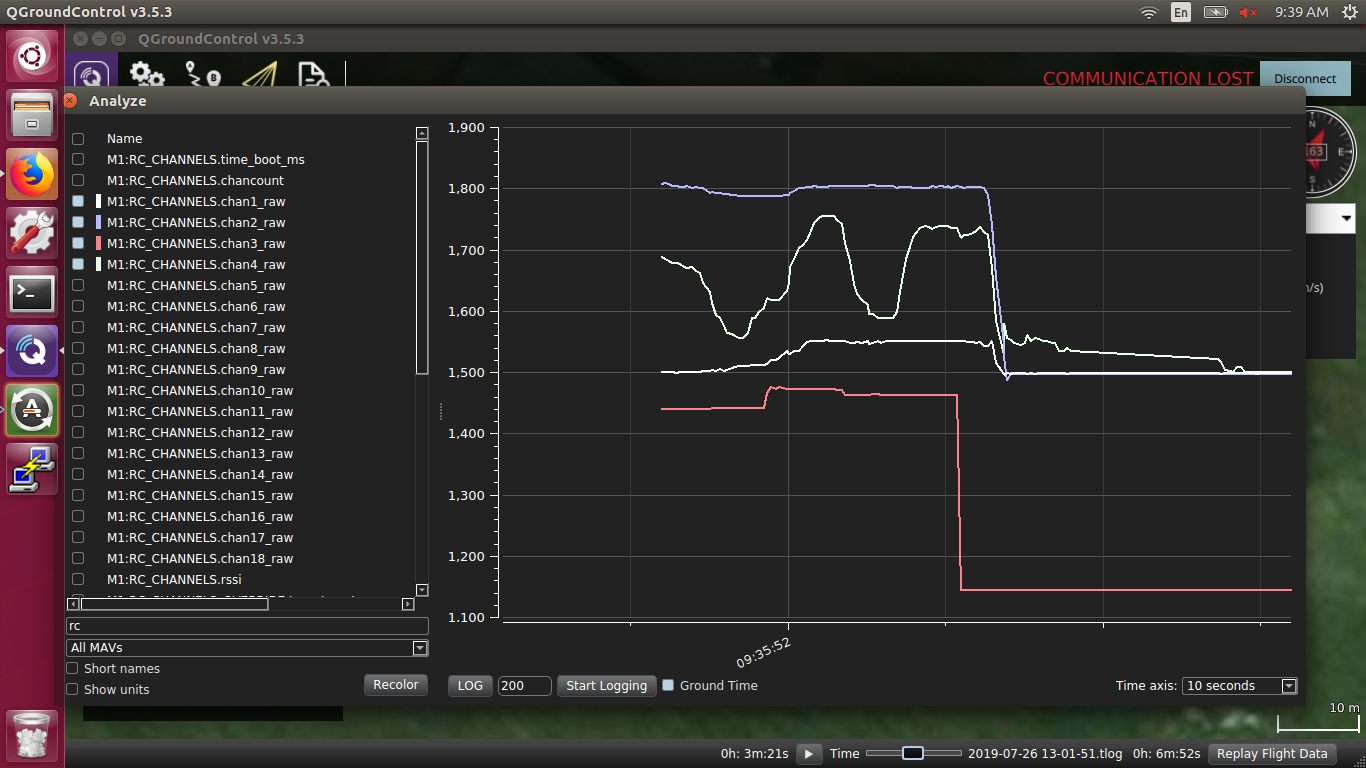
Could you upload a log where you’re able to arm but have no control?
I went back to 1.8.2 and it was working again, but I just went back to 1.9.1. I will look for it to occure again, and upload a log. Its been good for the most part but periodically it will stop listening to a channel or several. Just now it stopped listening to my arming switch on channel 5, even in the Radio tab no value changes are detected on that channel, but the others are acting normally. Powercycling the UAV brought back functionality, but this is a little nerve racking. I don’t like to lose disarming haha Will update with more info when available.
I had a similar issue occur again this past friday. I took the quad out for a quick battery flight test, and partially after a short while my throttle channel dropped connection and the quad fell.
This has happened randomly before with other channels(I’ve lost roll, and arm/disarm in the past) I have tried with several OrangeRX R111xn receivers and with 2 different Spektrum DX7S transmitters. Both work for some time but both have showed the issue. I am at a loss here. I’ve also had issues getting the receives into Bind mode with QGC. I have a tlog of the event also, if that could help.
@jcharette do you have a log when this happens that you could upload to https://logs.px4.io?
And when it happens, could you please do px4io status in the MAVLink console and paste the output here?
Yes, I plan to do some testing today, and I’ve set it to log to begin at power up so I should be able to catch it. The only log I have of the last event is a tlog.