During my test flight on Saturday, the aircraft disarmed the motors while in manual flight mode. I have been using PX4 software for years, and this is the first time I have encountered such a situation. Telemetry and SD Logs are below. Thanks for support.
I started the flight with automatic takeoff, I did not arm from the remote controller. My remote controller is Spektrum DX9 Black Mode 2 and DMSX receiver.
Yes, there may be a problem due to this “It could also be that your RC glitched or started to send wrong values”.
I have experienced this, it turned out to be a slightly sticky arm button on the GPS, so something that can happen over time. Unlike Arducopter, PX4 will disarm if it sees a button pressed even when in the air! Crazy!
In my opinion, disarming motor after starting the flight should not be connected to a single button. Kill switch is dedicated for this issue.Also a stick combination is necessary.
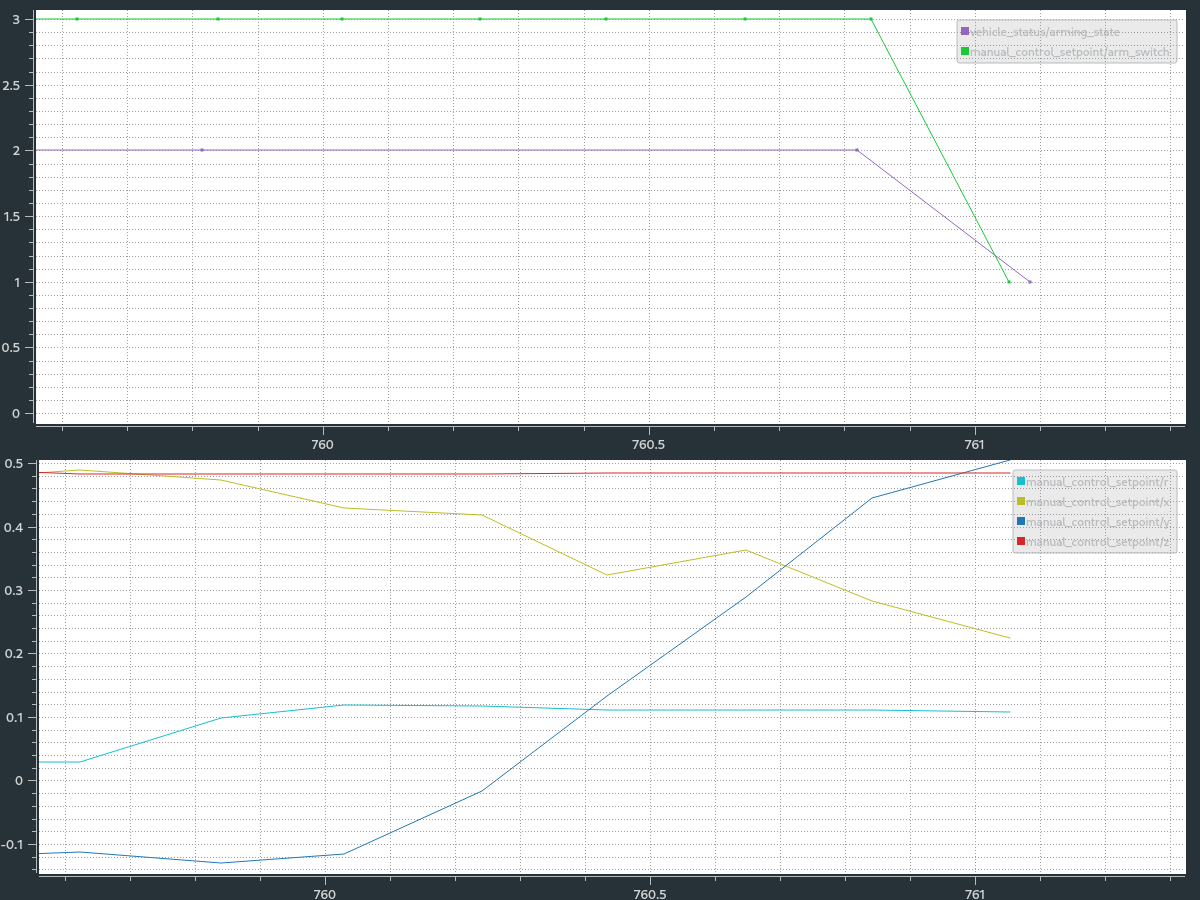
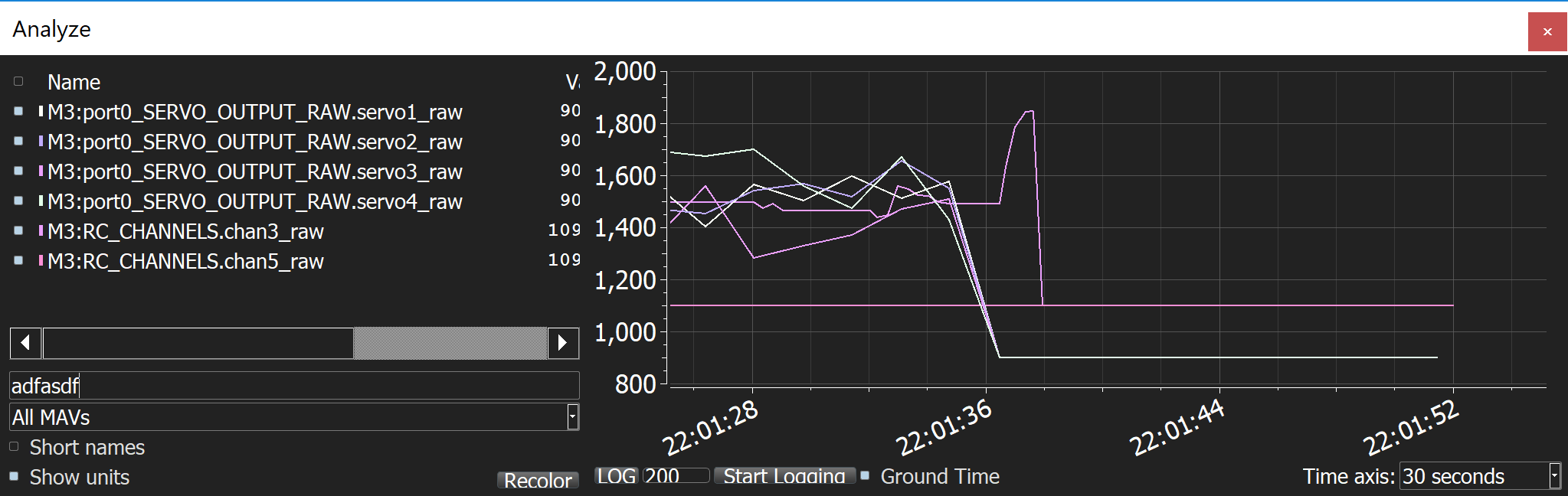
Watching that channel in QGroundControl with the tlog I see it used between flights but not activated near the end. The throttle increases while the servo outputs are falling so it doesn’t seem to be an RC glitch, though the reported RSSI did look a bit low during the flight. I can’t seem to confirm or deny the explanations offered so far.