I want to connect the “Pixawk Cube” with a “Raspberry Pi” by “UART”.
The main purpose is to use the RTPS/ROS2 interface after the connection being established.
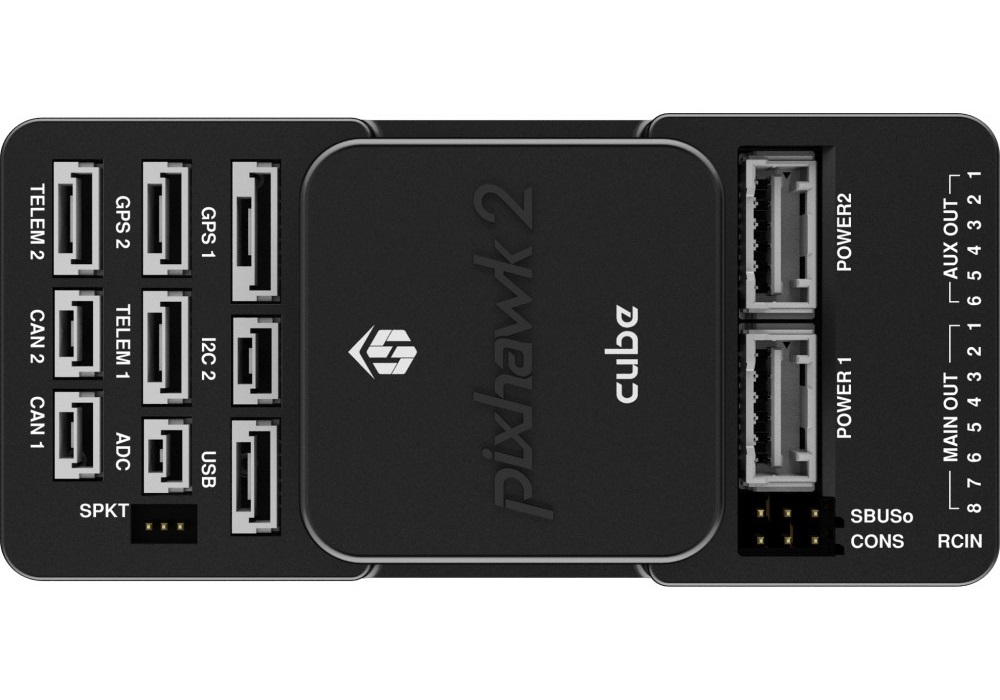
Which psychical ports can I use for the UART protocol? There is no explicit “UART port” like SPI or I2C in the picture below. Telemetry 2, GPS 2? Which cable should I use to connect the two devices and which pins from the port should I choose since UART just needs 3 pins?
Thankful by your answer!
The pinout from Pixawk 4 was really helpful. The suggestion to use TELEM2 with the corresponding port configurations too. However I’m afraid that specific configuration is just for mavlink protocol communications. Since I want to use Real Time Publisher and Subscriber (RTPS), the port configuration should be different. Exploring your link, I found this : https://docs.px4.io/master/en/advanced_config/parameter_reference.html#RTPS_CONFIG
Hope to be in the right way now! If you or someone already though to use RTPS as communication protocol and could confirm this, I would appreciate.
{kind=link}