Hi - I have upgraded to a Pixhawk 6X from a Pixhawk 2 and want to continue using my Raspberry Pi Companion. The documentation says that Mavlink listens on Telem2, but I cant seem to find how to change it to USB-C connection, given the enum here: Parameter Reference | PX4 User Guide
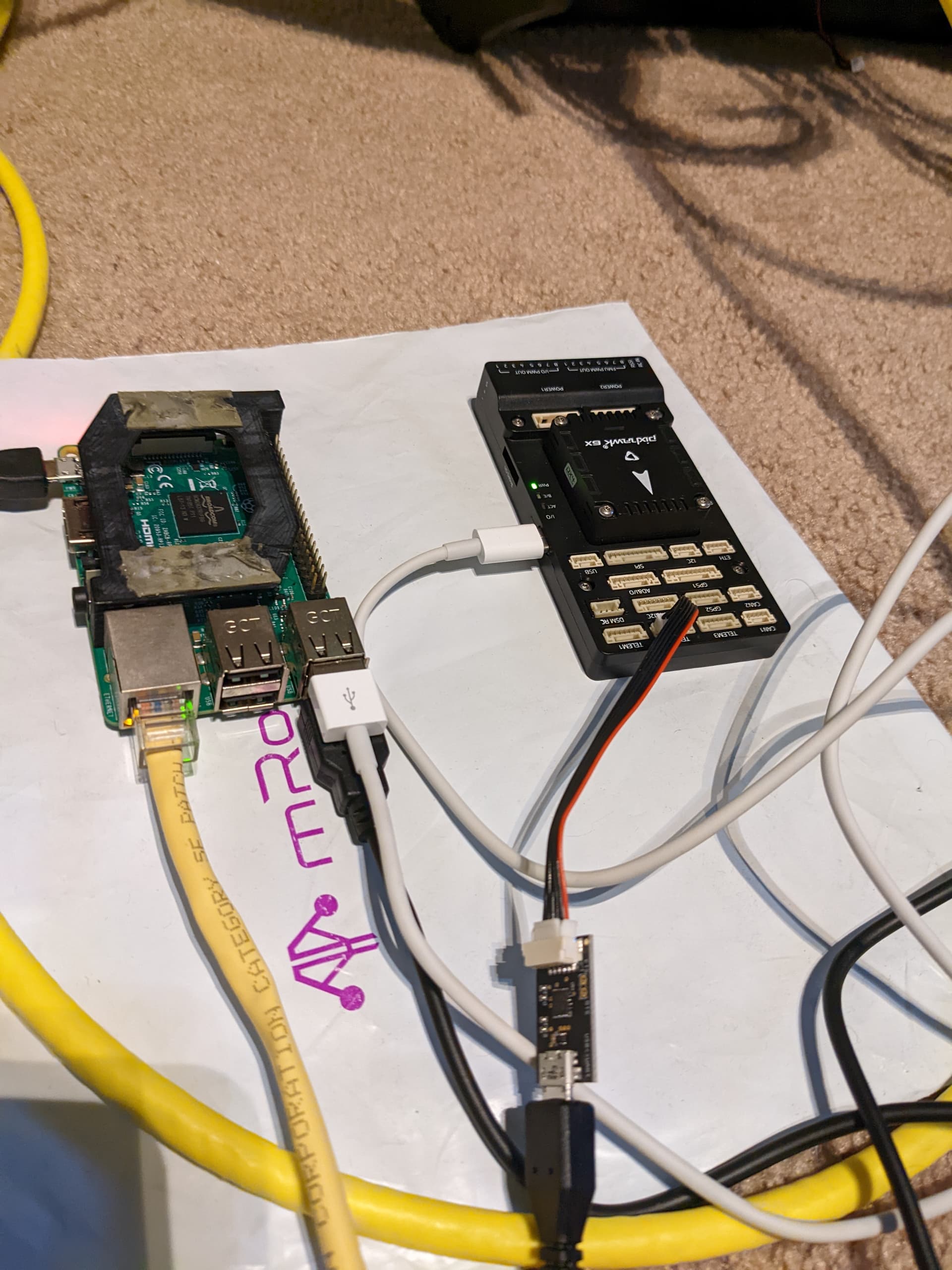
So I was able to get it communicating via the Companion out of Telem2 with the JST-GH. However, the strange thing is that it wants to have BOTH the JST-GH and the USB-C cable attached before it recognizes the 6X on /dev/ttyACM0. See attached picture of setup. This is with the 6X being powered externally on Power1. As you can see I have 2 USB connections from Raspberry Pi to 6X. But it only gets info on the Telem2.
That’s weird. Can you elaborate a bit further? Which is your PX4 configuration (parameters, version, ecc) and what does exactly happen when you don’t have both cables plugged in? /dev/ttyACM0 is the serial device associated to the usb-c connection or to the telem2 port?
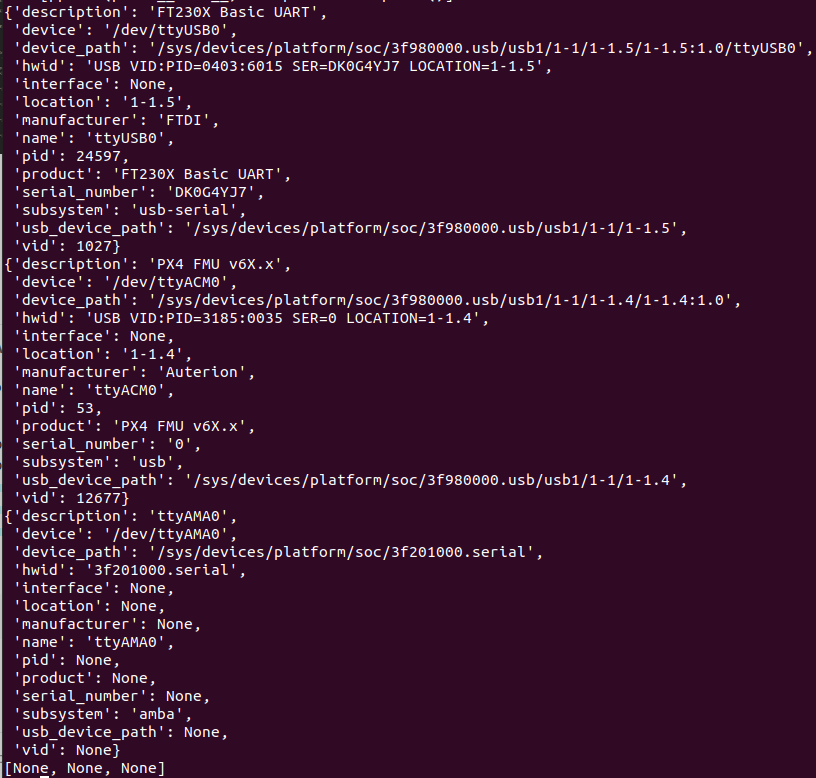
Interestingly, ttyACM0 is the USB-C port because you can see that the telem2 is on ttyUSB0 because Im using a FTDI JST-GH to USB and you can see the FTDI uart on ttyACM0 (see screenshot).
If I just have either one plugged in it does not work.
I am newbie to PX4 environment and I want to use GPS2 port and TELEM3 port as a UART Serial configuration. Basically, I want to send and receive data to and from 2 sensors attached on these 2 ports independently. What I’ve understood till now is that I’ll have to develop a driver on PX4 for this purpose. Please guide how can I start? I am using Qgroundcontrol.
working through a similar issue now. What I found is the autopilot is configured as a UART slave device. the FTDI is also a slave device. Since neither is a host device, the functionality of setting up and controlling the connection doesn’t exist.
Apparently configuring PX4 to be a host is not trivial which is why everyone recommends using a third device (arduino, or Pi or whatever) to host both the FTDI and the autopilot.