I’ve been trying to generate a custom PX4 firmware with CRSF and ELRS support.
I’m using a Ubuntu box, and a new account so it’s not got anything installed that shouldn’t be.
I couldn’t find a wiki for the build process, so I used Microsoft Co-Pilot to walk me through it all. It’s not hard - as long as you know what you’re doing. (like most things)
After generating custom firmware and installing it, the necessary parameters don’t appear. I tried defining them as defaults in config files - but they didn’t help.
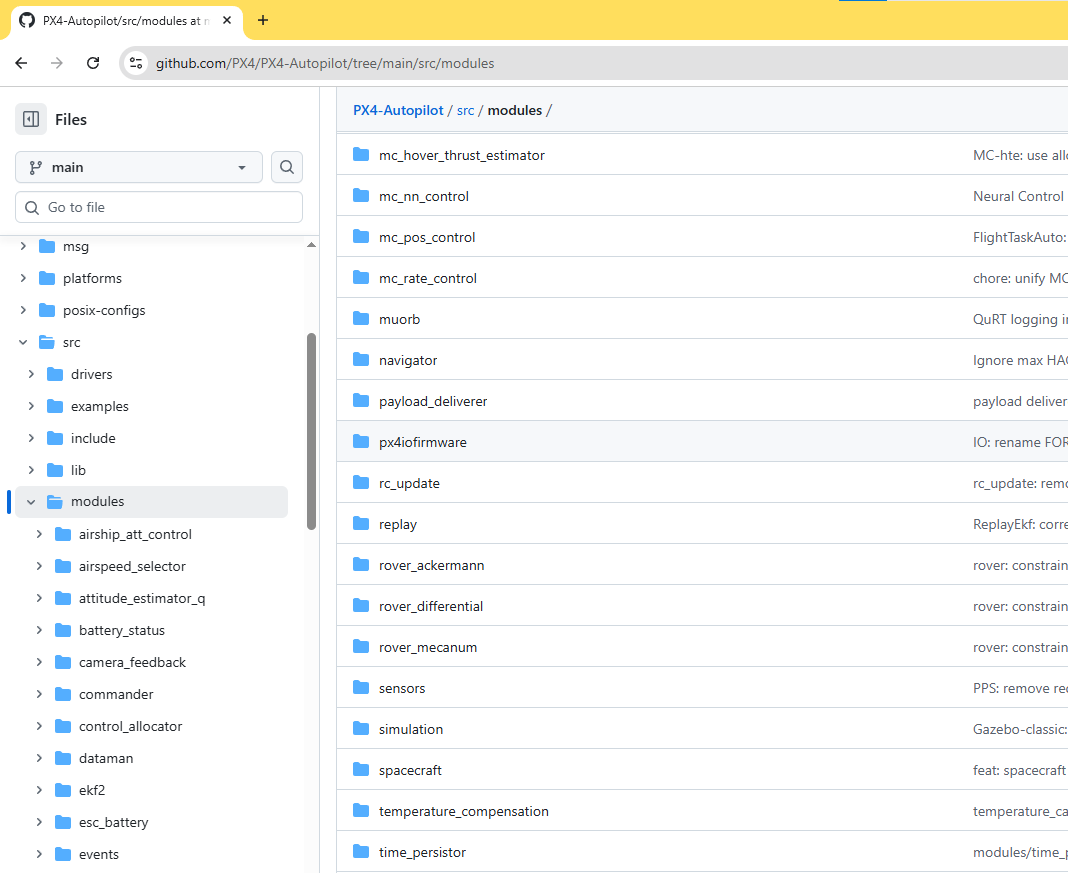
I started poking around the version 1.16 repository - and I’m not sure CRSF support is in there.
My research indicated that there should be a directory in the repo: src/modules/rc/crsf
I think co-pilot is failing you, try Claude. Also a quick google search should have gotten you there.
You shouldn’t need a custom build, all that is required is CONFIG_COMMON_RC=y or DRIVERS_RC_CRSF_RC=y in the .px4board for the target you’re using. Also ensure RC_CRSF_PRT_CFG param is set and that nothing else is configured on that port.