I have a hexacopter running PX4 on the Cube Flight controller.
Before updating the firmware to v1.10 (e.g. running v1.9.2) it worked without major problems (flight log here).
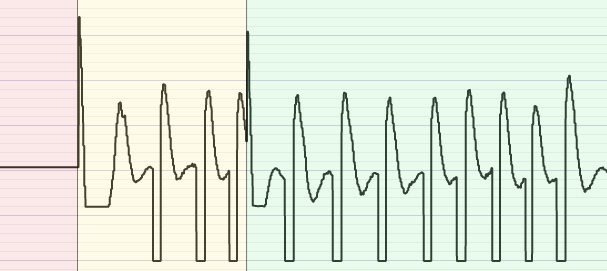
After updating to v1.10.1, though (flight log), the altitude mode is inherently unstable:

Also, the logs show the I2C1 being low on stack:
0:19:47 INFO: [logger] Start file log (type: full)
0:19:47 INFO: [logger] Opened full log file: /fs/microsd/log/2020-02-17/10_04_02.ulg
0:19:48 INFO: [commander] Takeoff detected
0:19:53 WARNING: [load_mon] wq:I2C1 low on stack! (268 bytes left)
0:20:04 WARNING: [load_mon] wq:I2C1 low on stack! (268 bytes left)
0:20:15 WARNING: [load_mon] wq:I2C1 low on stack! (268 bytes left)
0:20:26 WARNING: [load_mon] wq:I2C1 low on stack! (268 bytes left)
0:20:37 WARNING: [load_mon] wq:I2C1 low on stack! (268 bytes left)
0:20:48 WARNING: [load_mon] wq:I2C1 low on stack! (268 bytes left)
0:20:59 WARNING: [load_mon] wq:I2C1 low on stack! (268 bytes left)
0:21:10 WARNING: [load_mon] wq:I2C1 low on stack! (268 bytes left)
0:21:21 WARNING: [load_mon] wq:I2C1 low on stack! (268 bytes left)
0:21:25 INFO: [commander] Landing detected
Did anyone else experience similar behavior after updating? Are the two observations related? Is this a bug in the firmware, a configuration error on my behalf, or just bad luck? ![]()
Edit: Without meaning to, the flight on v1.10 was with MPC_POS_MODE set to 3 (jerk limited trajectory), while the flights on v1.9.2 all were with MPC_POS_MODE set to 1 (slew rate limited trajectory). If not properly configured, maybe the jerk limited trajectory planning could have caused the thrust “hiccups” in altitude mode? ![]()