Hello all
I’m testing a y-3 tilt rotor using px4. (E-flite convergence airframe)
My plane is good at transition. But I looked at the flight log and found something strange.
I did almost 100% thrust but px4 didn’t keep the thrust at 100%.
Here is my log image.
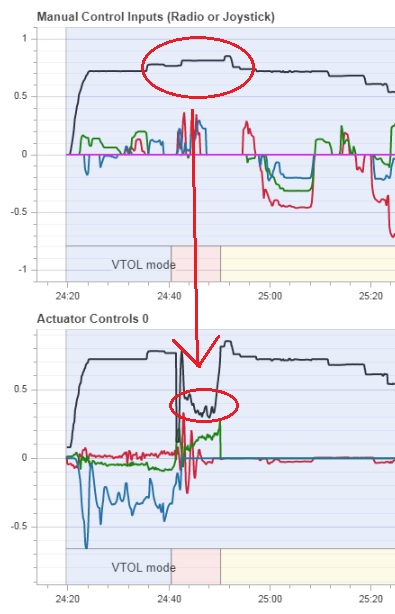
The upper graph’s black line is my control input and lower graph’s black line is actuator control.
I want to know why that is.
Have a goooood on ![]()
![]()