Hello. My VTOL tiltrotor is Quad Rotor, the front two motors are tilt, and the rear motor is fixed type.
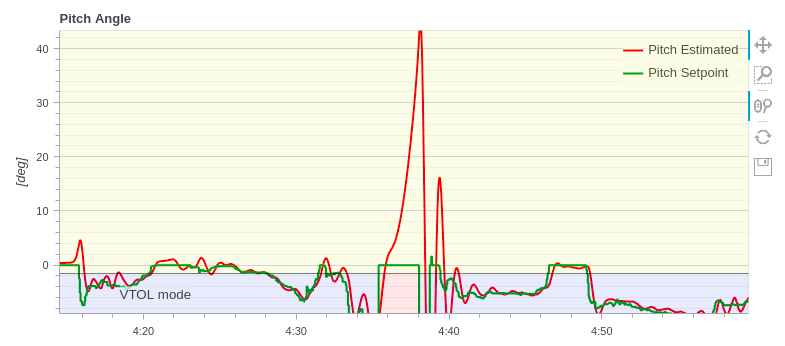
Switching from multicopter mode to transition mode for forward transition during hovering (45 deg tilt) reduces the thrust of the rear motor to the Pitch Up state.
VT_ARSP_BLEND is 8m/s, VT_ARSP_TRANS is 14m/s, and the airspeed conditions are not met.
@Park_SH Are you sure the CG is at the correct position? For me it looks like the vehicle is aerodynamically unstable, since it is trying to aggressively pitch down during transition, but is pitching up.
The front motor tilts 45deg when the VTOL toggle with the RC controller during the flight of my aircraft, so the aircraft has an extreme pitch angle, not forward.
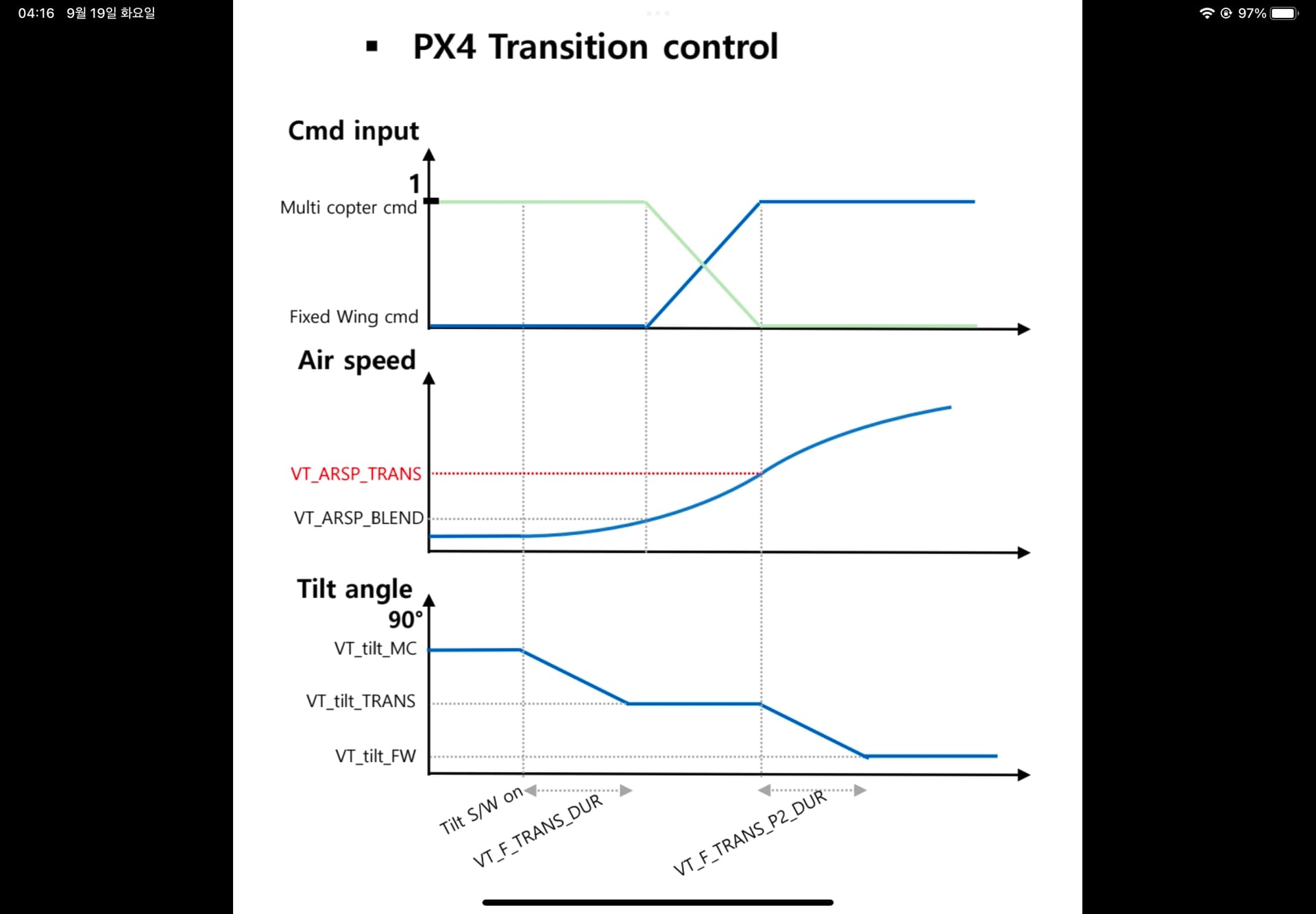
As far as I understand, when it is tilted at a certain angle through the VTOL toggle, MC Command should have 100% until the VT_ARSP_BLEND condition is satisfied as shown in the picture below.
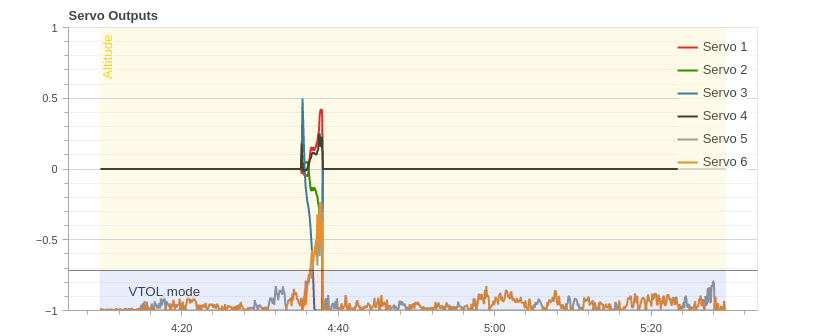
However, it seems that MC Command and FW Command are blending immediately after toggle if flight test and ground test are conducted. (Airspeed 8m/s is not satisfied). In the ground test, when the gas is tilted after the toggle, the control plane and RPM react.)
Therefore, the front motor tries to meet the VT_F_TRANS_THR 0.7 condition by tilting, but the rear motor seems to have a pitch due to insufficient MC Command weight.
What I want is that MC Command should have 100% weight until VT_ARSP_BLEND 8 m/s is met.