I’m testing a tiltrotor using convergence airframe.
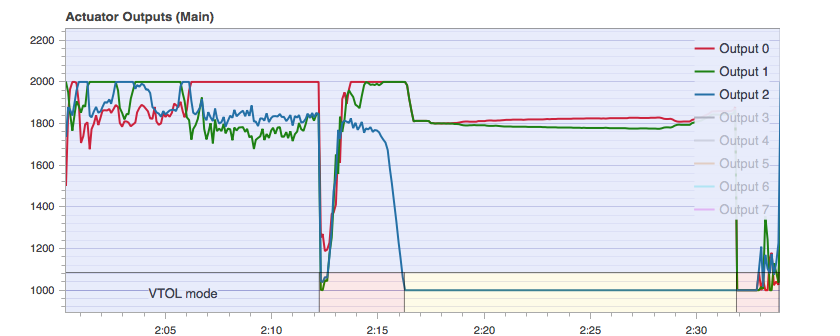
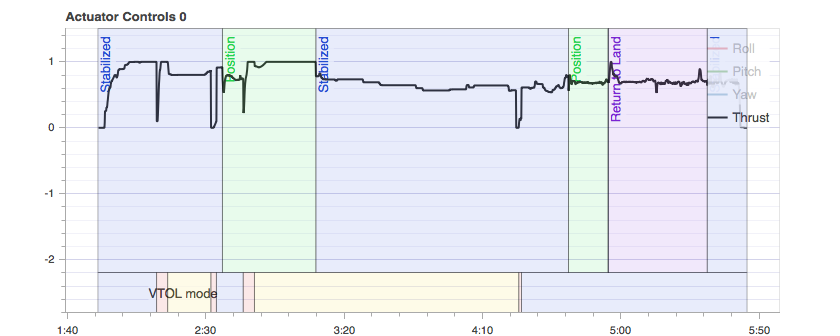
When performing a front transition, the throttle always drops to zero suddenly during the first phase.
Here is the log link:https://logs.px4.io/plot_app?log=79824200-9462-4298-80c4-d8fde13c9e01
I’m testing a tiltrotor using convergence airframe.
When performing a front transition, the throttle always drops to zero suddenly during the first phase.
Here is the log link:https://logs.px4.io/plot_app?log=79824200-9462-4298-80c4-d8fde13c9e01
Let me ping @sfuhrer here.
I’ve replied on the corresponding github issue: https://github.com/PX4/Firmware/issues/14688