I have a large coaxial octocopter. I have 28-inch propellers, and I entered the frame type as ‘Generic 10" Octo coaxial geometry.’ I positioned the autopilot on the drone’s nose. Motor directions and connections are correct. The drone started to wobble from the moment it took off, and approximately 3-4 seconds later, it couldn’t be controlled, resulting in a crash. I am sharing my log. Where am I making a mistake?here is log https://logs.px4.io/plot_app?log=ff006717-6ab7-4849-94a1-5444e26fa0e0
Can you share a picture of your drone?
Looks like the tuning did not translate to the big drone that you tried to fly.
I would try to do some first tuning tests with the drone suspended using a rope and a kill switch on RC ready to switch off once it starts oscillating. Then you’ll have to slowly try to tune it in stabilized mode.
Also see:
Multicopter PID Tuning Guide (Manual/Basic) | PX4 User Guide (v1.14)?

Try to do very cautiously small hops in stabilized mode while doing the first tuning steps.
I think so that the actuators have overed 2000 is the main reason.
https://review.px4.io/plot_app?log=0857baa4-efeb-4e58-86b4-a627e957ff01
I have set my Proportional (P), Integral (I), and Derivative (D) coefficients to low values. In my second flight, I attempted to fly in stabilize mode, but the outcome was not as expected. Experiencing continuous disturbances during the tuning process should not be normal. here is my tune
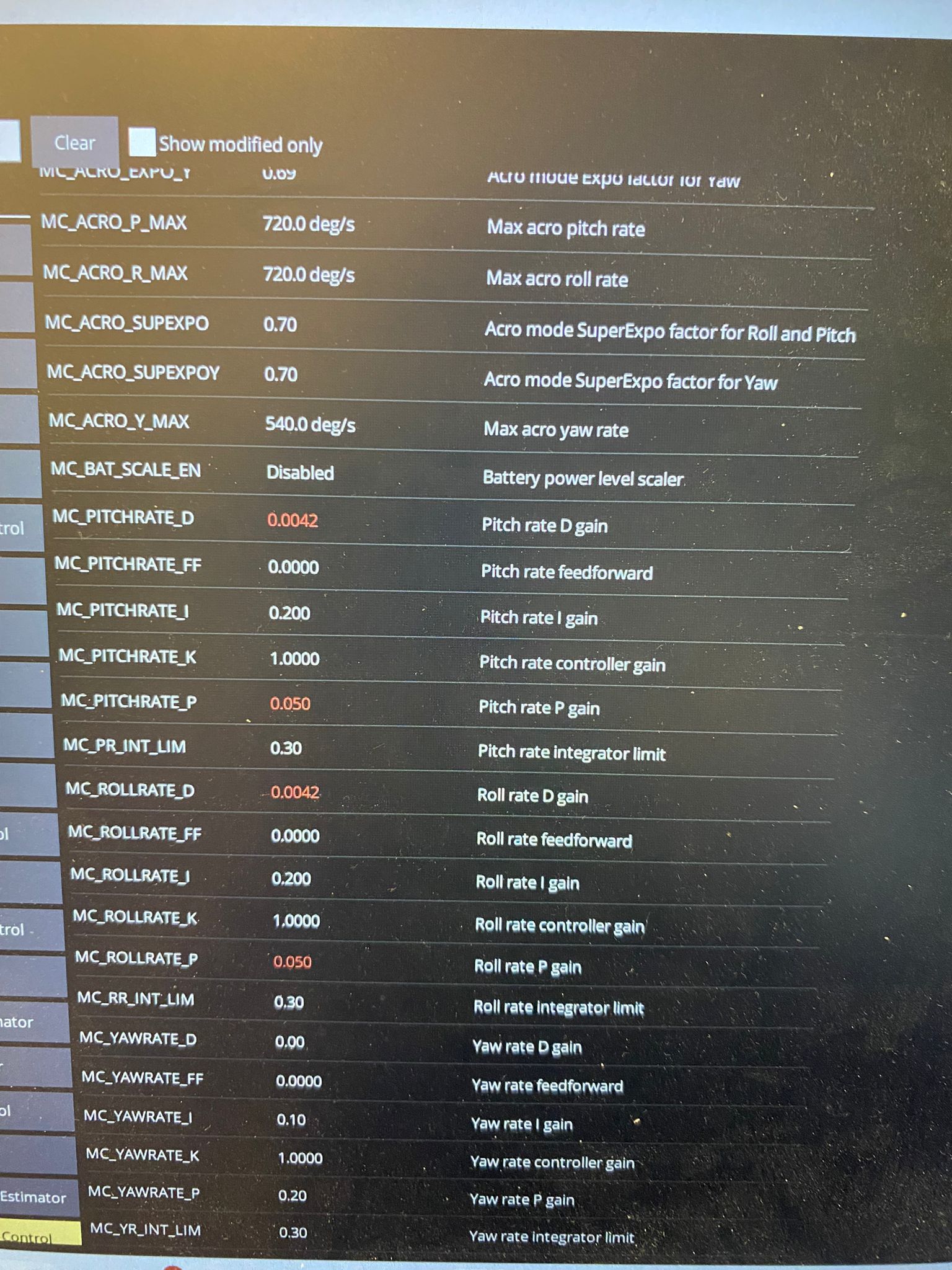
what is wrong with it? i did not supply cube orange direct from battery there are 2 converters .1st one is 48v to 24 v .second one is cube orange step down module
https://review.px4.io/plot_app?log=81b1e189-48b2-46a4-9b4a-92d922e408c8
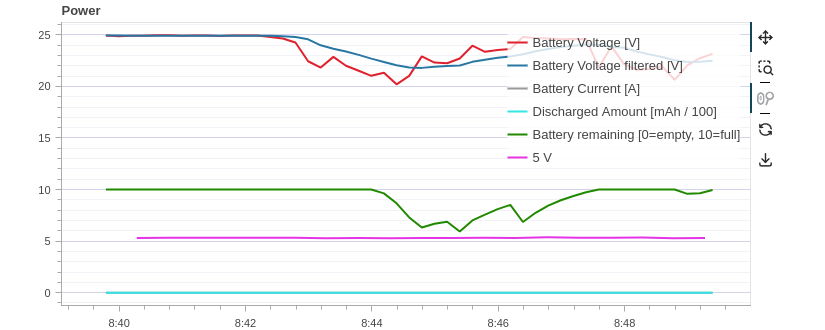
Today’s flight was in altitude mode with the gain values I shared earlier. This time, I didn’t crash, but it still needs optimization. What approach should I take regarding my PID values
what i see from the log is, you have really bad vibrations (from raw acceleration graph). Try to minimize them with mechanical means.
use this link for initial log checking.
Merhaba Batu, did you solved your issue? Where did it originated from? Vibration issues or too aggressive tuning? I also have a similar (same) aiframe and have already crashed twice