Good Morning Community,
I am very new to this topic and after a drone crash with a custom built drone I try to get es much out of the logs as possible. I am very new to this topic and therefore also happy about references regarding information/tutorials to read. The person who built the drone left and I wonder mostly if the drone is not tuned properly and if due to construction issues vibration could be a serious issue.
Please find the logs here:
https://logs.px4.io/plot_app?log=1a2f2e65-b516-45a9-8751-f59d427b38f4
Following the pilots description on a first flight, the drone took off in rc controlled position mode, the drone suddenly climbed uncontrolled and he killed it within the air, restarting it and killed it a second time close to the ground where it slightly crashed. It was observed that there where quiet large gps position errors with this drone when it was placed on the ground, however this did never trigger any failure state.
When I observer the logs I think at 0.15.33 the geofence was triggered and switched to the Loiter mode, may due to Gps position estimated error the drone climbed which may surprised the pilot and he killed it.
Main Questions:
- I really wonder if vibration is an issue here:
I followed the tutorial and for me the Actuator Controls FFT looks suspicious however the amplitude is really small compared to the reference plots in the tutorial. Also the Raw Acceleration curve looks not well in my opinion. The main vibration metrics are sometimes higher than 0.05 however I could not find a reference here in the tutorial.
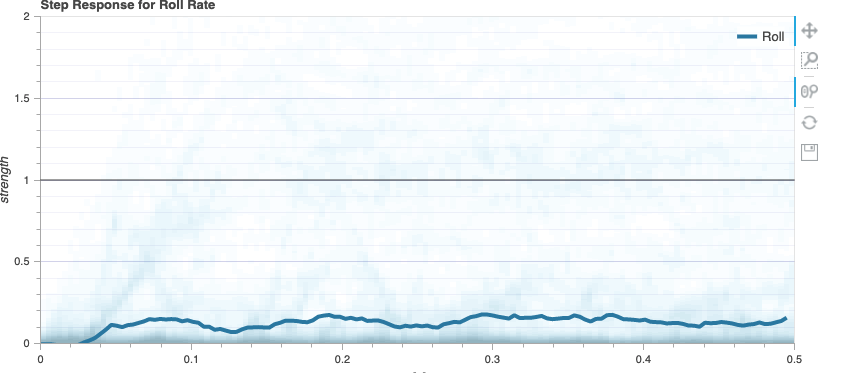
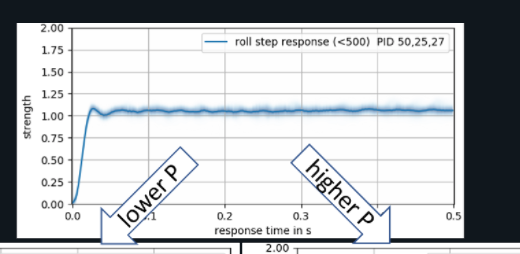
- Do you think this drone needs to be auto tuned?
Especially Pitch Angular rate and Roll Angle seem to really differ in Estimated and Setpoint.
I would be very happy about any comments and suggestions or hints