On Monday I was able to do some test flights with 1.5.0 RC1 on a fixed wing. My plane is a Hobbyking Teksumo with Pixracer, Drotek Neo-M8N and Frsky X8R receiver. I use the airframe configuration for the TBS Caipirinha, but I do not have an airspeed sensor.
Although it was very windy and gusty it did fly pretty well and I was surprised how well it does perform. I did fly 5 batteries every about 10 - 15 minutes. I tested the following modes: Manual, Stabilized, Alt Hold, Pos Control, Loiter and RTL. In addition I did turn off my receiver to test failsafe.
During my flights I recognized one issue:
Two times the sensors did not start up correctly. After plugging in the battery and laying the plane on the ground the orientation and virtual horizon in QGroundcontrol did show continuous fast movement. After unplugging and plug in again, everything went back to normal.
I can do more testing on the weekend, so feel free to post fixed wing test tasks.
Could you look for the msgs_*.txt file on the sdcard that corresponds to the sensor startup failure?
Sorry, I did not find the corresponding msgs file anymore. I will do more test flights today and post the msgs file if the failure reappears.
@dagar
Today the startup issue did happen again.
The msgs Text file does not have the date and time in the name like the other ones: MSGS_2~1.TXT
And the content of the file is:
2000_01_01_00_00_05: GPS fix lost
2016_10_28_09_25_50: ARMED by RC
2016_10_28_09_25_50: Takeoff detected
2016_10_28_09_25_50: [logger] file: /fs/microsd/log/sess001/log001.ulg
2016_10_28_09_26_31: [cmd] DISARMED by arm/disarm component command
2016_10_28_09_26_33: Landing detected
2016_10_28_09_26_43: NOT ARMING: Press safety switch first!
2016_10_28_09_26_43: NOT ARMING: Preflight checks failed
I although armed to get a logfile and I was able to throttle up. But I didn’t try to takeoff as with sensor failure this could only end in a crash.
Could you please take a look at the logfile?
@timoski hello!I have a problem about using the airframe configuration for the TBS Caipirinha without airspeed sensor:
I have set the parameters according to this two page 1)VTOL’S WITHOUT AIRSPEED SENSOR.2)TBS Caipiroshka.I have conducted indoor test and outdoor test.Now the plane can hover well .But MC-FW transition is failed !!
#The problem is:
when I Toggle transition RC switch which channel is assigned to AUX1,but the ailerons don’t response to the RC yaw and pitch input ,and then the plane is not under control.How to solve this problem?
Your log has both accel and gyro logged.
So the problem you actually see is with the attitude indicator? Can you expand on this? Does it seem like it could be a comms issue? Do you see any specific errors in the QGC messages?
Hi Libing, you are flying a VTOL, right? My teksumo is just a normal flying wing. Your issue seems related to a VTOL problem. I’m sorry I don’t think I can help you with that.
Thank you for checking the log files.
The issue is that after plugging in the battery, the orientation (pitch, yaw and roll), vehicle speed and position is changing very fast, it seems somehow random. The issue appears about every 20th time I plug in the battery.
I did not get any error in QGC.
What do you mean by comms issue? The communication between QGC and pixracer or any sensor communication?
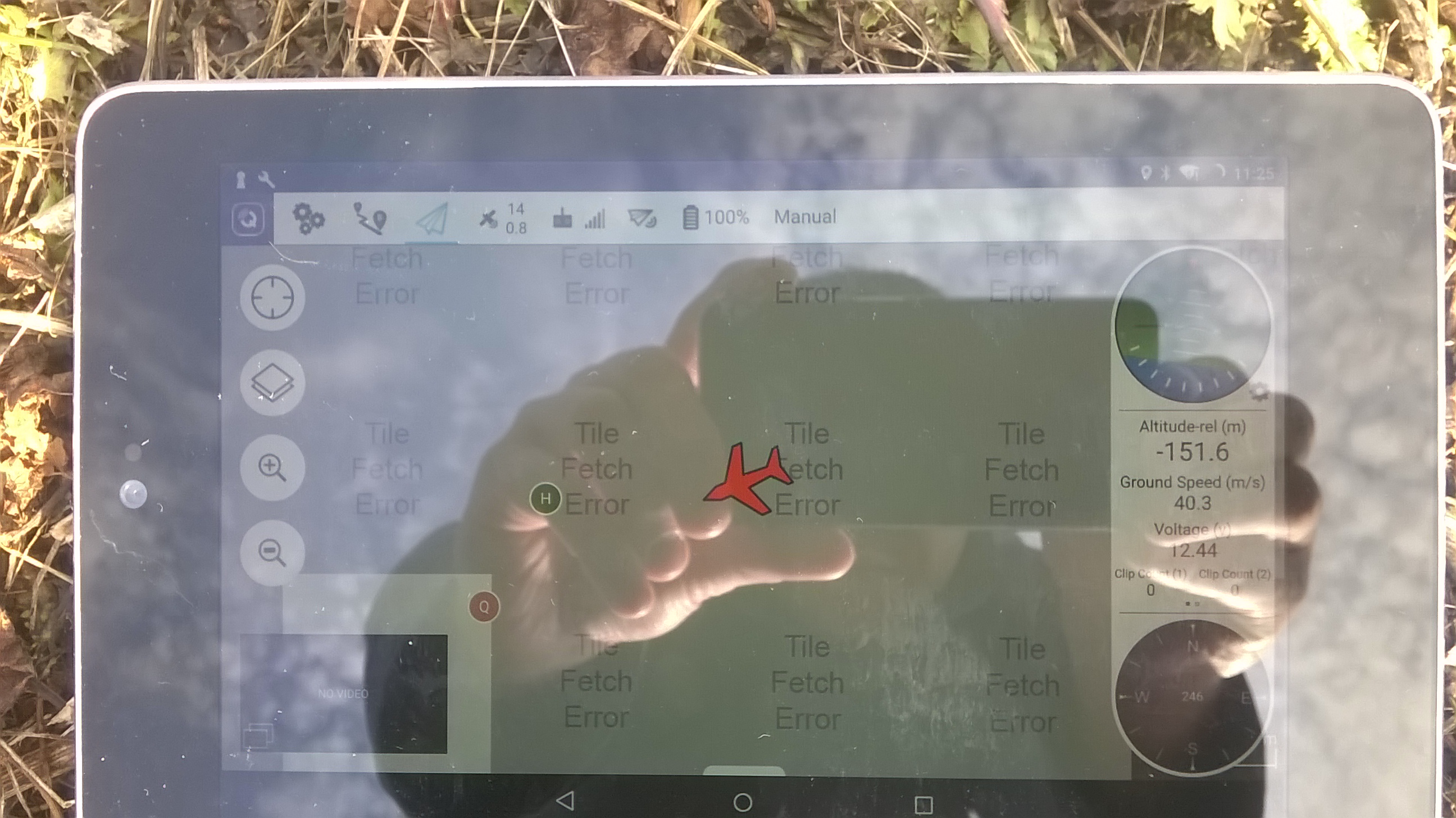
I took two photos from QGC when the issue did appeared:

How did you open the log file? I tried flightplot but I wasn’t able to plot ulog files.
Thank you for the same.
Try this to plot the .ulog file
http://logs.px4.io/
Thank you. I did upload the log file:
http://logs.px4.io/plot_app?log=7c999b8f-1bb8-4aeb-91ba-afcc70307312
There are five warnings logged: [lib__ecl] EKF GPS fusion timout - resetting to GPS
Do you think it is related to the issue?
The data from the sensors seem to be good. So it’s probably related to EKF2!?