Some general questions regarding terrain following in QGroundControl.
First off, we are pre-planning missions in the office, selecting vehicle follows terrain, and then heading to the field. We are getting an error once in the field regarding terrain following. We have to de-select that option to continue. I am assuming this is because we do not have internet, and therefore QGC is unable to download, " Terrain following uses terrain heights queried from AirMap servers".
Is the cellular/network connection problem the source of this error?
Is there a way to download the terrain data in the office in advance?
Secondly once we are able to enable terrain following, I’m curious in regards to the nature of the terrain following.
Does a single flight line simply follow a straight line (elevation) from a waypoint on one side of the line to the other?
Or, does the UAS follow the terrain data along a single flight line continuously altering its elevation up and down in relation to the terrain model?
You should be able to plan a terrain mission somewhere with internet and then fly it without connectivity. Attach the plan file and I can take a look.
Are you using “Above Terrain” or “Terrain Frame” for terrain follow? If “Above Terrain” then only the waypoint alt will be adjust for terrain. Flight path in between the waypoint will fly a straight line no matter if there is a mountain in between.
If you are planning a Survey you have that follow terrain and it will create a plan where the interior of the survey transects are adjusted for terrain as well. So that will “really” follow terrain.
“Are you using “Above Terrain” or “Terrain Frame” for terrain follow? If “Above Terrain” then only the waypoint alt will be adjust for terrain. Flight path in between the waypoint will fly a straight line no matter if there is a mountain in between.”
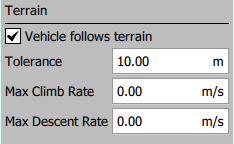
The only option we have whether we go with “Survey” pattern or “Corridor Scan” pattern is a checkbox under Terrain for “Vehicle Follows Terrain”. Please advise where the settings are for “Above Terrain” & “Terrain Frame”.
Worth noting is that our version of QGC is for an Alta X, so possibly it has been modified?
Thank you. Curious if we should be expecting the vehicle to “really” follow terrain now or if it will go straight-line from one way point to the other no matter if there is a mountain between?
Also since you are flying Alta X which I believe uses PX4 firmware then only Survey and Corridor Scan patterns support follow terrain. General follow terrain using regular waypoints in a mission (“Terrain Frame”) is not yet supported by PX4.
It’s an “Altitude Mode”. By default QGC sets a Plan to use all relative alts. If you want something fancier you change it from Mission Start where you can pick another specific altitude mode to use or mixed which means you are going to possibly change altitude modes on an item by item basis. You won’t see “Terrain Frame” for PX4 firmwares as being able to be selected.