I am using a standard USB2Serial converter and the dongle has been set for 3.3V. when I connect the USB2Serial on the computer, /dev/ttyUSB0 appears, no problem.
on PX4 side, SYS_COMPANION has been set to 921600 bauds
This set up works perfectly well on the Pixracer but with the PixHawk 2.1, I get no transmission from the Pixhawk, i.e. when I launch MAVROS, it is starting and then wait for px4 but there is no response.
Can you tell me what is missing here? Thank you very much for your help
@DanielePettenuzzo I am using the lastest version 1.8.2 I think - same version is used on the PixRacer
I will provide the mavlink status on Monday
Is there any parameter in px4 I need to set besides sys_companion?
Thank you for your support
@DanielePettenuzzo
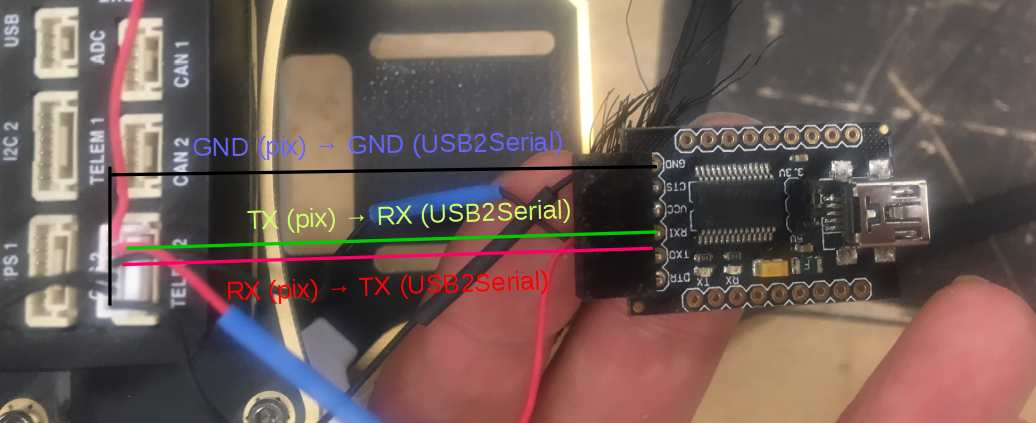
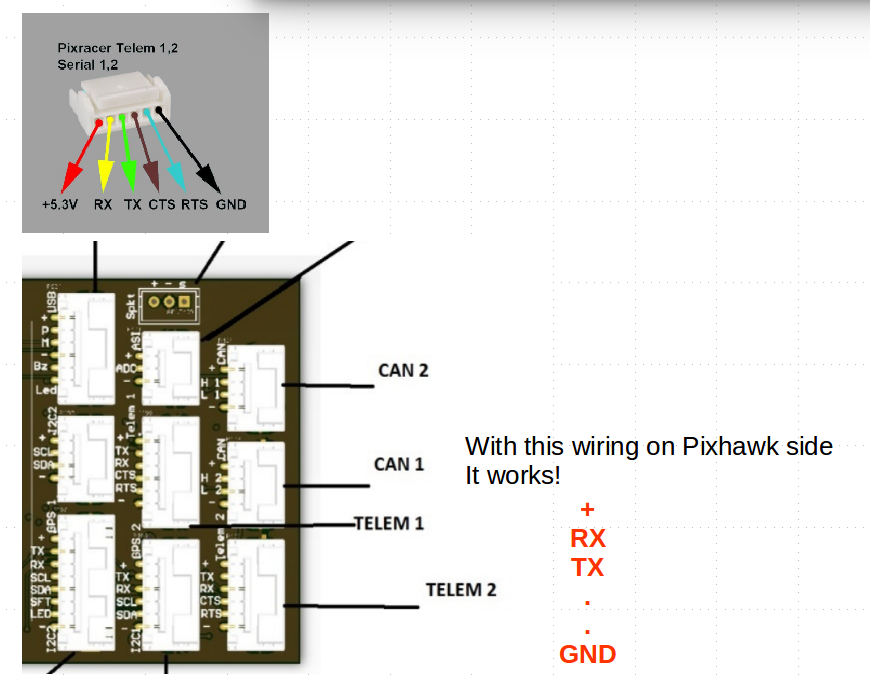
Sorry for my late reply, but actually i found why it was not working. I was using a pin out provided by a documentation but looks like, the pin out was not correct (see pic below). If I follow the pin-out of the pixracer for Telem2, I am able to run Mavros successfully