Hello, I have built a large symmetrical 8 kg payload co-axial octacopter UAV. Upon testing the drone seems to have little yaw authority in the CCW direction. I researched online but couldn’t find how the PX4 controller handles the yaw rotation.
From my understanding in the pair that is involved with the desired yaw direction the upper motor speeds up while the lower motor slows down in order to provide the counter-torque for the yaw of the vehicle. In this manner, each arm keeps the same overall vertical thrust and a net torque is produced. Is this correct ? Can you provide any details about how the yaw controller works in an octacopter co-axial configuration ?
Will a small cant angle (tilt towards the yaw direction) in the motors help in creating more control authority ? From my point of view the up and down motors of each arm should have opposite angles so that the component of the thrust vector between doesnt get cancelled by the one of the adjacent arm. Any advice on that matter would be helpful !
PID tuning will also be needed to make the yaw gains more aggressive I suppose.
Hard to say without a log file, but if I recall correctly a large prop octocopter will need some aggressive tuning for good yaw authority.
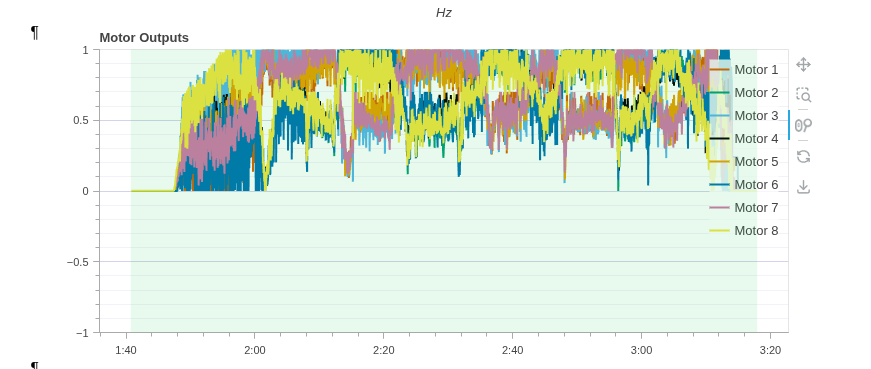
This is the longest log I have. The yaw seems awfully underactuated. There is also a lot of noise on the pitch and roll graphs. I didn’t do a sensor calibration before the flight, as I have done it in the same place a month ago. This seems to have worsened the behaviour of the drone. The pixhawk is soft mounted, should i try to hard mount it onto the frame (Pixhawk 6x). Any reply about the details of the yaw controller in the coaxial configuration ? Maybe, someone with experience in PX4 flight control architecture can help !
George
This doesn’t look well tuned. Your gains look way too high. Look at the motor outputs. What is the size and weight of this airframe?
The tuning parameters are all stock. The ESCs were calibrated. The diagonal of the drone is 1.9m and the weight is 22 kg.
The stock parameters will not work well for a large copter. You definitely need to tune.
Wow .txt file format is not supported here  Message me on Discord (@dakejahl) and I will share with you a param file from a 1m diagonal 25kg Octo-coax.
Message me on Discord (@dakejahl) and I will share with you a param file from a 1m diagonal 25kg Octo-coax.