Hi all,
I’m working on a ducted fan multirotor, and I’m experiencing yaw oscillation (tail wagging) during hover and flight. The issue seems more noticeable at high speeds or when hovering.
Here are some details:
- Platform: 2-inch ducted props, X configuration
- Firmware: PX4 v1.14.3
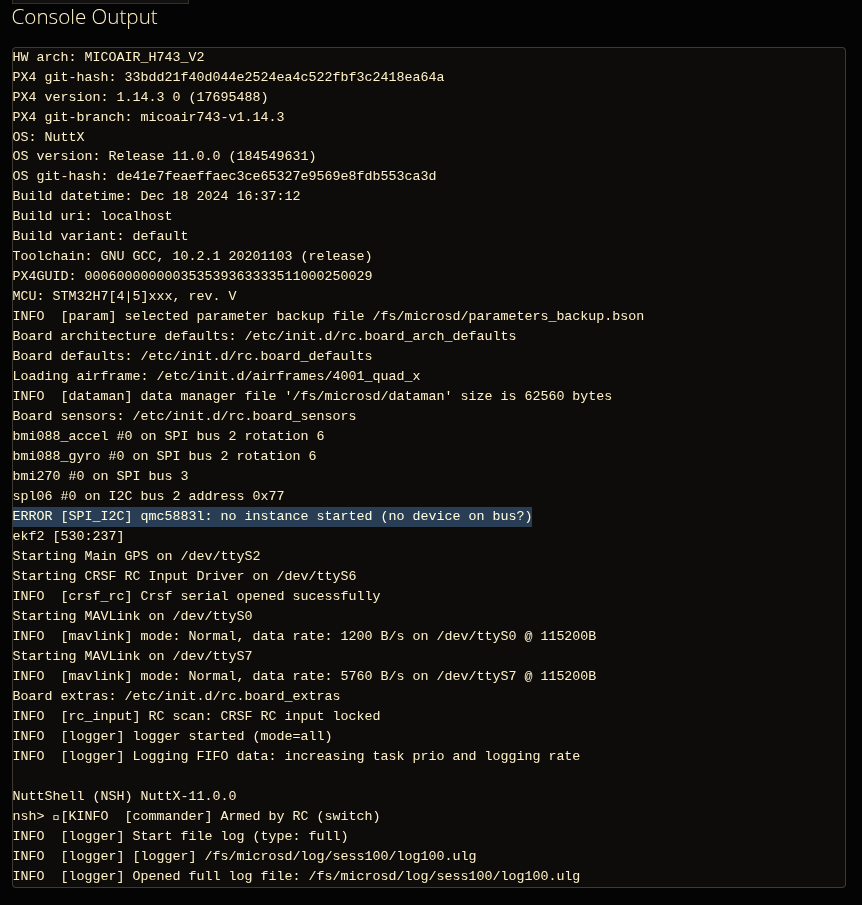
- Controller: [MicroAir H743]
- Propulsion: Ducted fans (suspect duct interaction affecting yaw)
- Yaw tuning attempts:
- Tested MC_YAW_P from 0.4 to 0.8
- Tried adjusting MC_YAW_I, MC_YAW_FF
- Reducing MC_YAW_P to 0.4 and increasing I to 0.4 reduced oscillation but didn’t fully eliminate it
- Yaw still slightly unstable, even after tuning
- Suspect: Possible aerodynamic effect from ducts interfering with yaw authority
PX4 Flight Log:
I’d appreciate any help on:
- Whether this is a control tuning issue or a result of the ducted fan aerodynamic characteristics
- Suggestions on parameter tuning for ducted fan setups
- Whether increasing MC_YAW_FF or adjusting rate filters could help
Thanks in advance!
I have found this, but don’t know why?
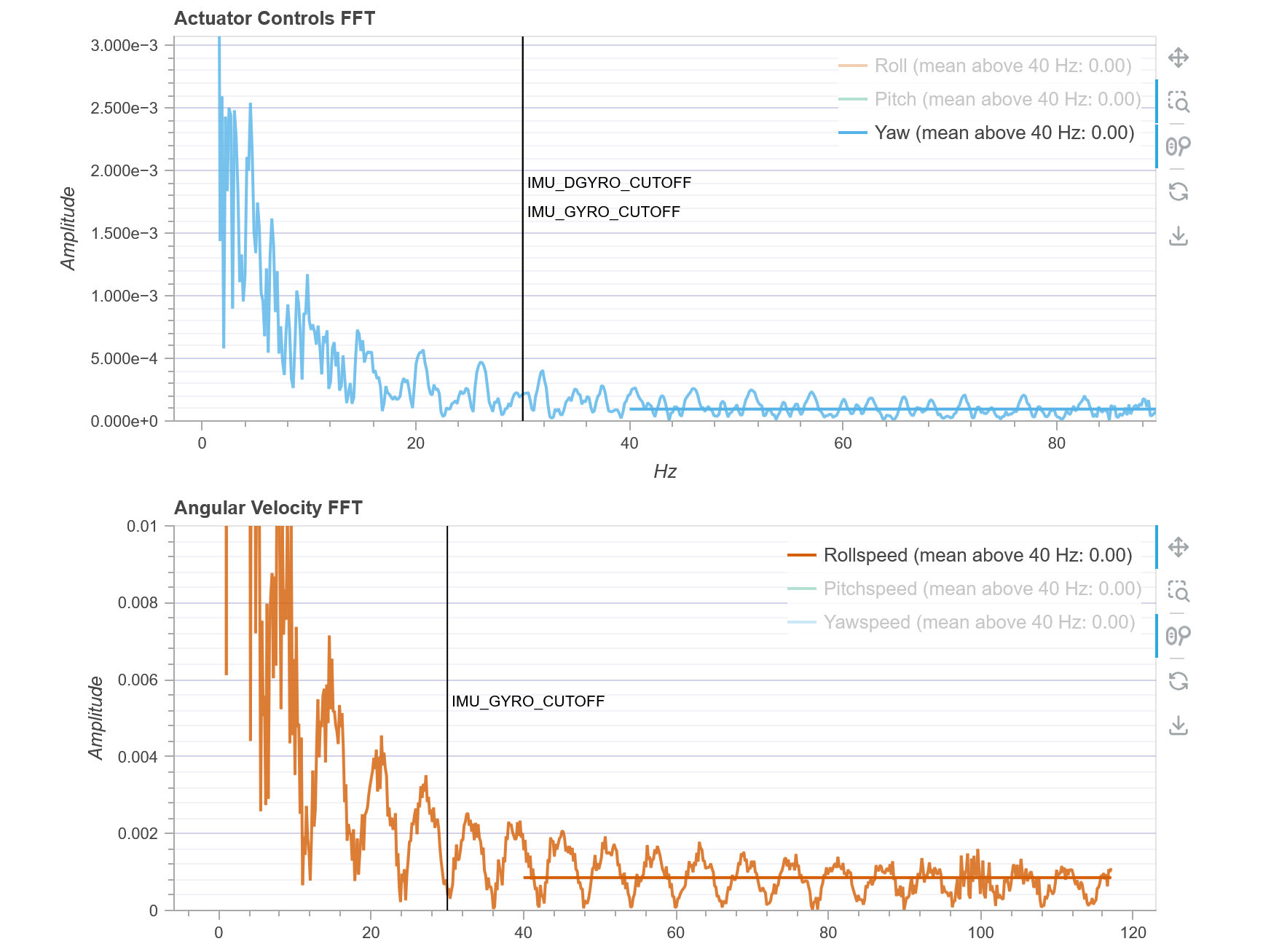
As you can see from the yaw angular rate graph, the yaw rate integral keeps increasing over time. As a result, motor outputs are diverging in pairs — motors 1 and 2 versus 3 and 4. This indicates that the propellers may not be generating enough force for yaw control. Alternatively, it could be that the magnetic field is being disturbed, causing the axis to drift.
@realstone1 Thanks for the analysis.
I’ve modified the frame, raised the propeller plane, and increased the inward tilt angle. Please help me check whether this is a yaw PID parameter issue, or if there’s still something else wrong.
there is no mag chip on board (no gps no other mag chip, maybe just default firmware settings). I think it will no affect the yaw if there is no mag.
It seems that your efforts have been effective — the divergence in motor outputs has decreased. The vibration levels also don’t appear to be a significant issue. It looks like the remaining problem is related to gain tuning of the rate controller.
Well, I don’t have much experience on rate controller tunning.
- Currently, it’s P=0.4 I=0.4 FF=0.15 on yaw
- I reset back to default settings, which is P=2.8 I=0.1 FF=0, it’s not working.
Do you have any recommendations(or links) for tuning the yaw oscillation of a ducted fan drone? Would increasing the FF to 0.3 help?
- Here is P0.4 I0.4 FF0.3
- Here is P0.45 I0.35 FF0.3 (NOT GOOD, yaw oscillation)
- Here is P0.35 I0.35 FF0.3, it fles ok, but quite a lot of pitch vibration. I don’t have any idea.