Hello, I’ve been running into an issue where the drone takes off, and will immediately start to drop in altitude unless I give it stick input, resulting in a ‘surging’ throttle in altitude mode. I’ve had this happen on three different drones so I suspect it’s a configuration issue with a parameter. The surging will even happen prior to actual takeoff, so I’m fairly confident the baro is interacting with the prop wash.
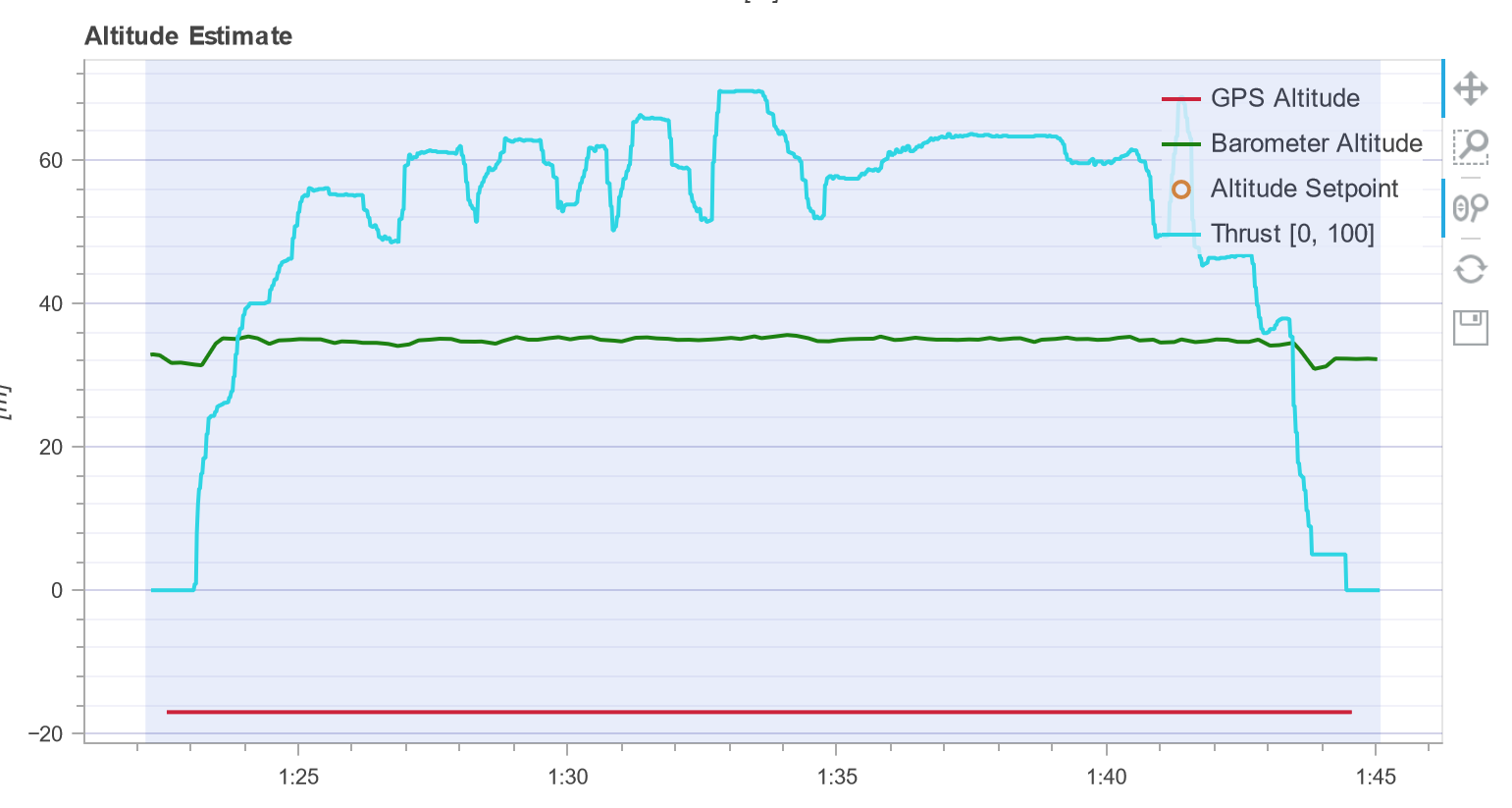
Once it’s in the air and settled it flies beautifully, but the first 10-20 seconds after takeoff require a lot of throttle adjustments, which make missions difficult. The Z axis shows it thinks it’s dropping by a couple meters prior to takeoff and I suspect it’s the result of a heavier drone with an open frame messing with the barometer.
A good example of this behavior with very inconsistent thrust is here: Flight Review
Any suggestions as to parameters to try adjusting? Thank you in advance for any suggestions!
Frame info:
Quad 5" props
Indoor drone with optical floor and GPS (but rarely has a fix)
Carbon fiber frame, open frame with flight controller ~10cm above the ground