Has anyone been able to accomplish successful UART loopback on Snapdragon Flight? I have tried multiple devices, even the test program doesn’t perform read or write correctly. I have tested with an oscilloscope as well as with a loopback wire from TX to RX on all four /dev/tty-<#> ports. I have tried using DSPAL read callback as well as regular read() method. My program looks very similar to the DSPAL serial tester. My read_callback(), read() and write() codes are below:
void port_read_callback(void *context, char *buffer, size_t num_bytes) {
int rx_dev_id = (int)context;
char rx_buffer[SERIAL_SIZE_OF_DATA_BUFFER];
if (num_bytes > 0) {
memcpy(rx_buffer, buffer, num_bytes);
rx_buffer[num_bytes] = 0;
PX4_INFO("/dev/tty-%d read callback received bytes [%d]: %s",
rx_dev_id, num_bytes, rx_buffer);
} else {
PX4_ERR("error: read callback with no data in the buffer");
}
}
int assign_serial_read_callback(int fd, int port_num) {
int res;
PX4_INFO("Beginning serial read callback setup");
struct dspal_serial_ioctl_receive_data_callback recv_cb;
recv_cb.rx_data_callback_func_ptr = port_read_callback;
recv_cb.context = (void *)(1);
res = ioctl(fd,
SERIAL_IOCTL_SET_RECEIVE_DATA_CALLBACK,
(void *)&recv_cb);
PX4_INFO("Using callback on fd %d",fd);
PX4_INFO("Set serial read callback on %s %s",
serial_path[port_num-1], res < SUCCESS ? "failed" : "succeeded");
if (res < SUCCESS) {
PX4_INFO("Closing file %s",
serial_path[port_num-1]);
close(fd);
fd = ERROR;
}
return fd;
}
int serial_read(int fd, int port_num, char *rx_buffer) {
int num_bytes_read = 0;
PX4_INFO("Beginning serial read");
num_bytes_read = read(fd, rx_buffer,
SERIAL_SIZE_OF_DATA_BUFFER);
PX4_INFO("%s read bytes [%d]: %s",
serial_path[port_num-1], num_bytes_read, rx_buffer);
if (num_bytes_read < 0) {
PX4_INFO("Closing file %s",
serial_path[port_num]);
close(fd);
fd = ERROR;
}
return fd;
}
int serial_write(int fd, int port_num, char *tx_buffer){
int num_bytes_written = 0;
PX4_INFO("Beginning serial write");
num_bytes_written = write(fd,
(const char *)tx_buffer,
strlen(tx_buffer));
if (num_bytes_written == (ssize_t)strlen(tx_buffer)) {
PX4_INFO("Wrote %d bytes to %s", num_bytes_written,
serial_path[port_num-1]);
} else {
PX4_ERR("failed to write to %s", serial_path[port_num]);
PX4_INFO("Closing file %s", serial_path[port_num]);
close(fd);
fd = ERROR;
}
return fd;
}
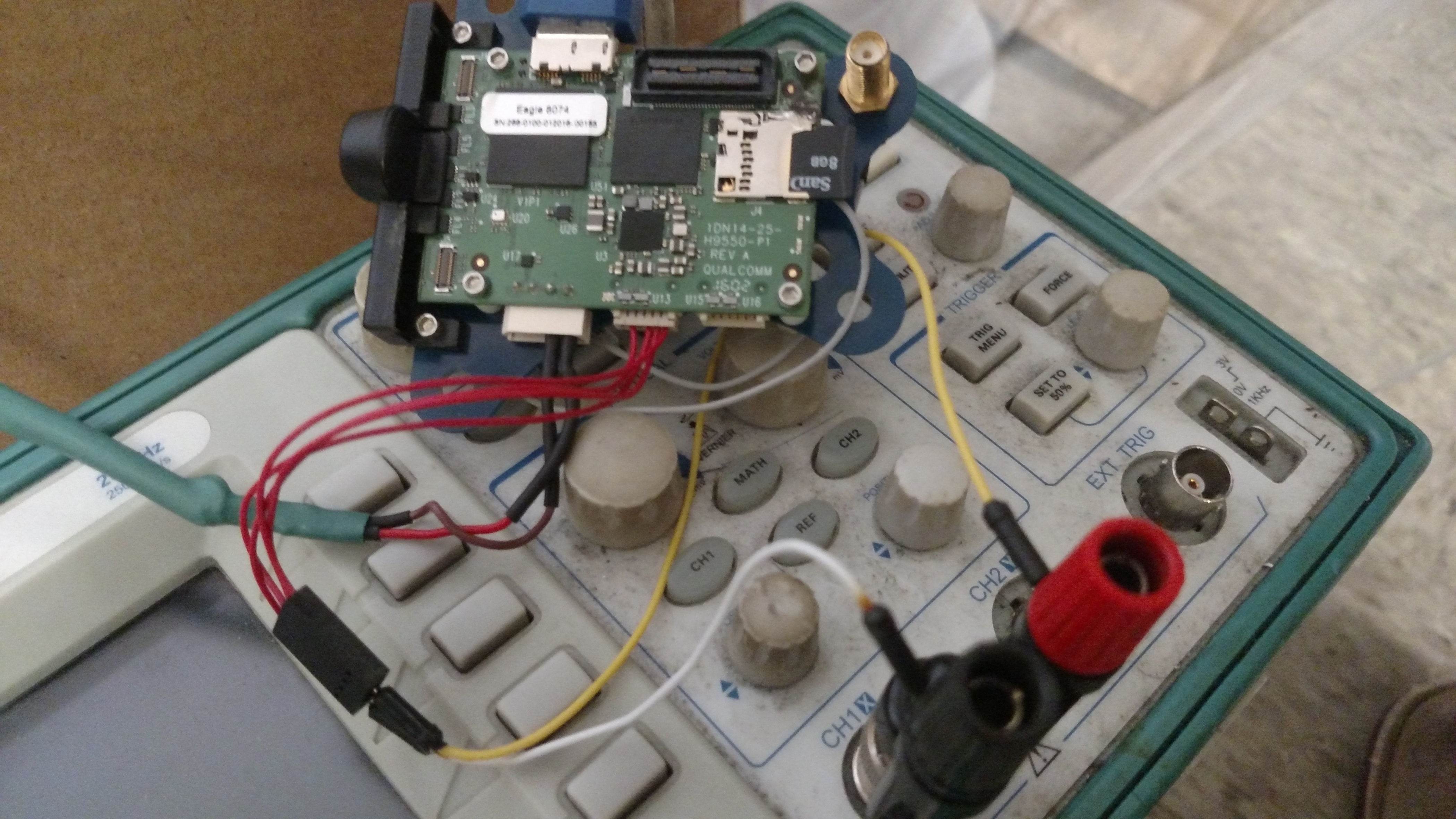
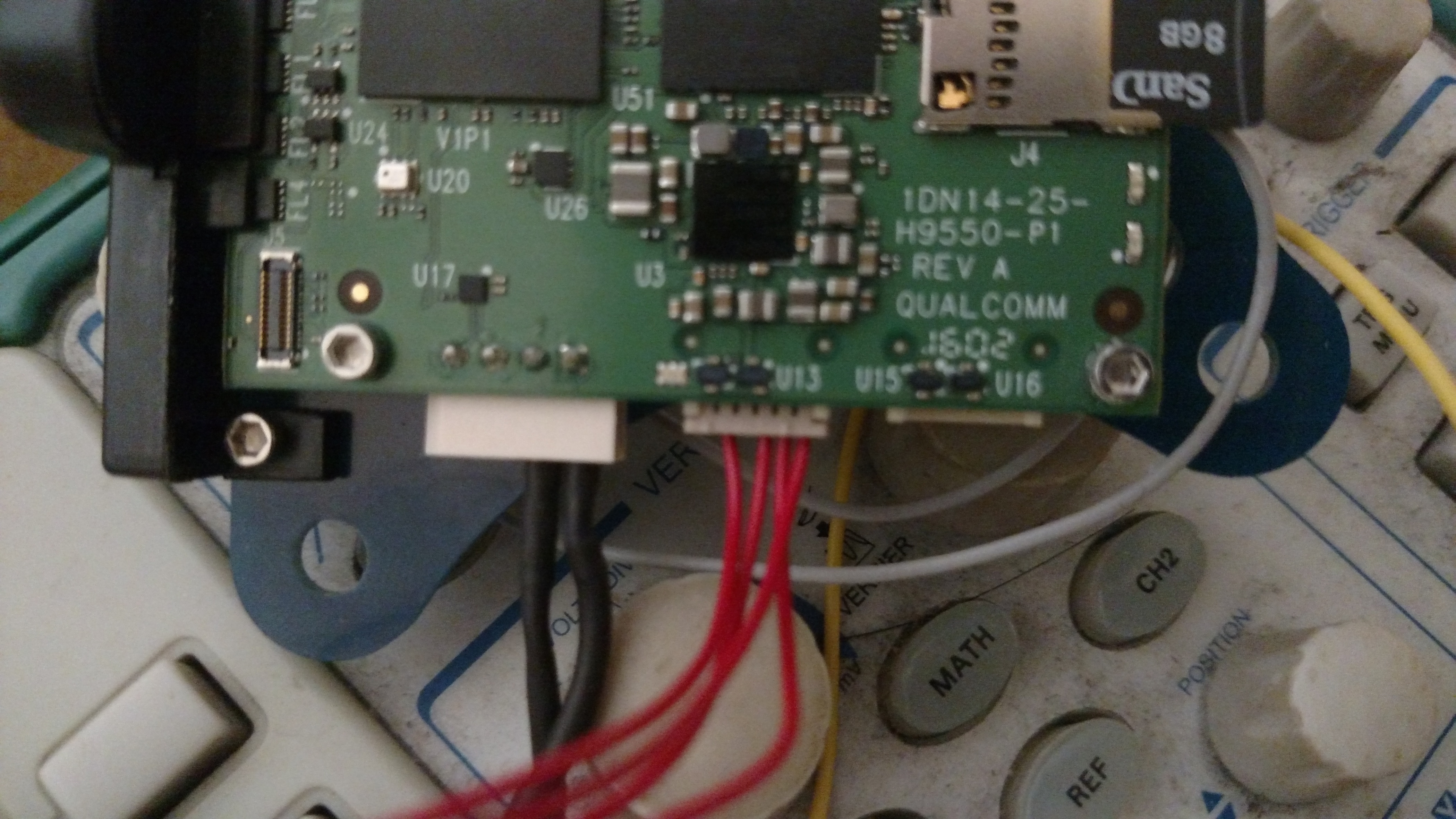
Edit: Pictures of scope and port setups
This is showing the port next to the power port, which I assume is J13 and tty-2 as prescribed by the blsp.config mapping from https://dev.px4.io/hardware-snapdragon.html. I also assume that pinouts are numbered from 1 farthest from the power port up to 6. Which makes the outputs shown on this connector to be {5V, TX, RX, GND}. APQ_GPIO{29/30} are not set up.
I find the results in the update when common ground (white wire) is connected to oscilloscope. And a quickly decaying output from TX every couple of microseconds at ~5V P-P (all ports, even inactive) when no common ground is connected to oscilloscope.
snapdragon flight port setup.
snapdragon flight oscilloscope setup