I have designed a custom flight controller board based on the STM32F405RGT6 microcontroller. The board includes the following hardware features:
- Three user-controllable LEDs
- Two GPIOs configured to support PWM output via Timer 12
- A Bosch BMI055 IMU sensor connected over SPI
To support this hardware, I followed the official PX4 development workflow and created a custom board configuration within the boards/ directory of the PX4 firmware. This includes all necessary configuration files and hardware abstraction layers specific to my board design.
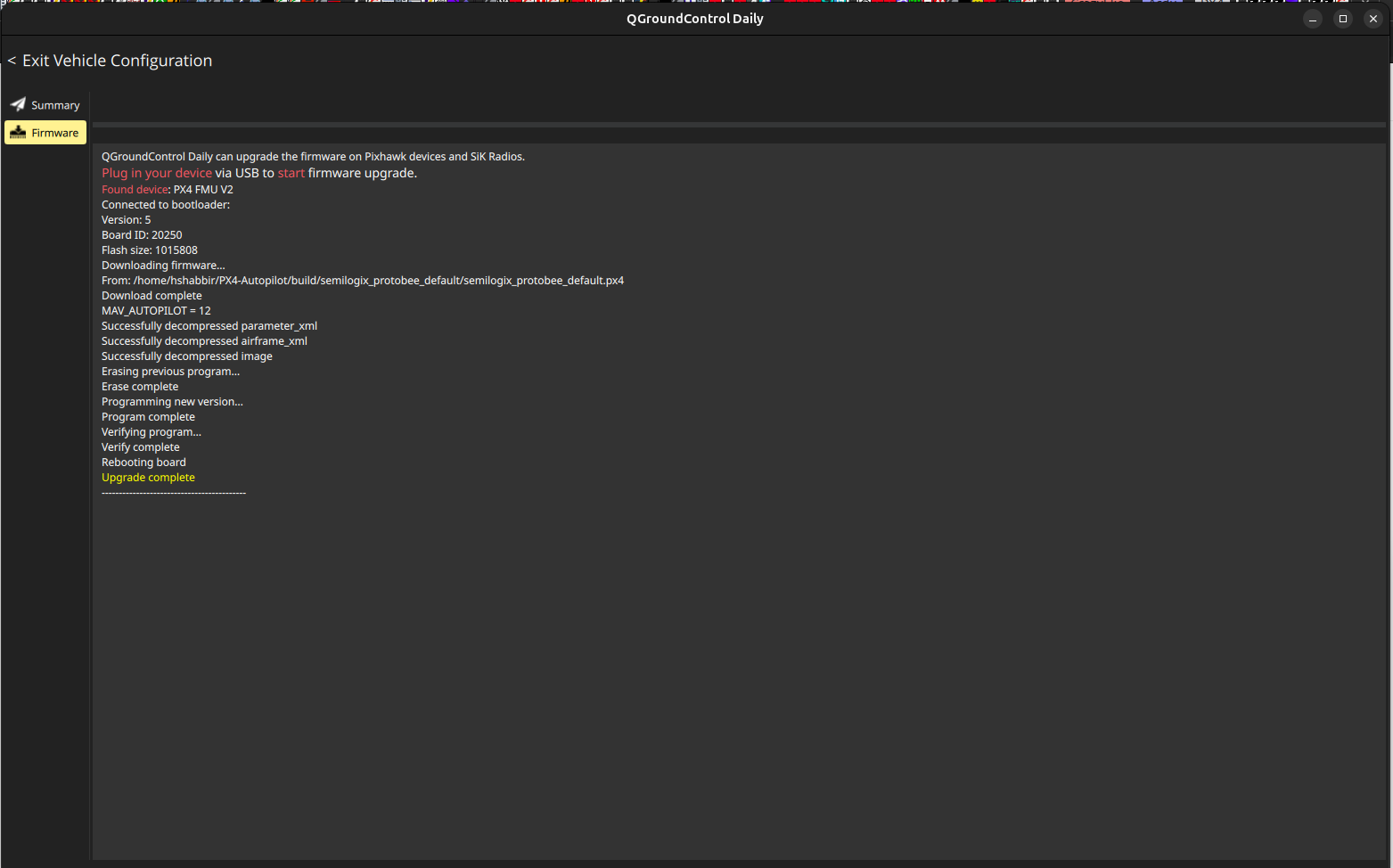
The firmware builds successfully and is uploaded to the board using QGroundControl via USB. However, after flashing, the board does not appear to establish a connection with QGroundControl. It seems that the board does not enumerate as a USB device after the firmware upload, preventing further interaction, including sensor calibration and parameter synchronization.
Attached the snap of QGroundControl