we are using a pixhawk 2.1 at the moment at we have got some problems with a strong yaw drift. The AP is succesfully calibrated and has the HERE+ GPS attached to it.
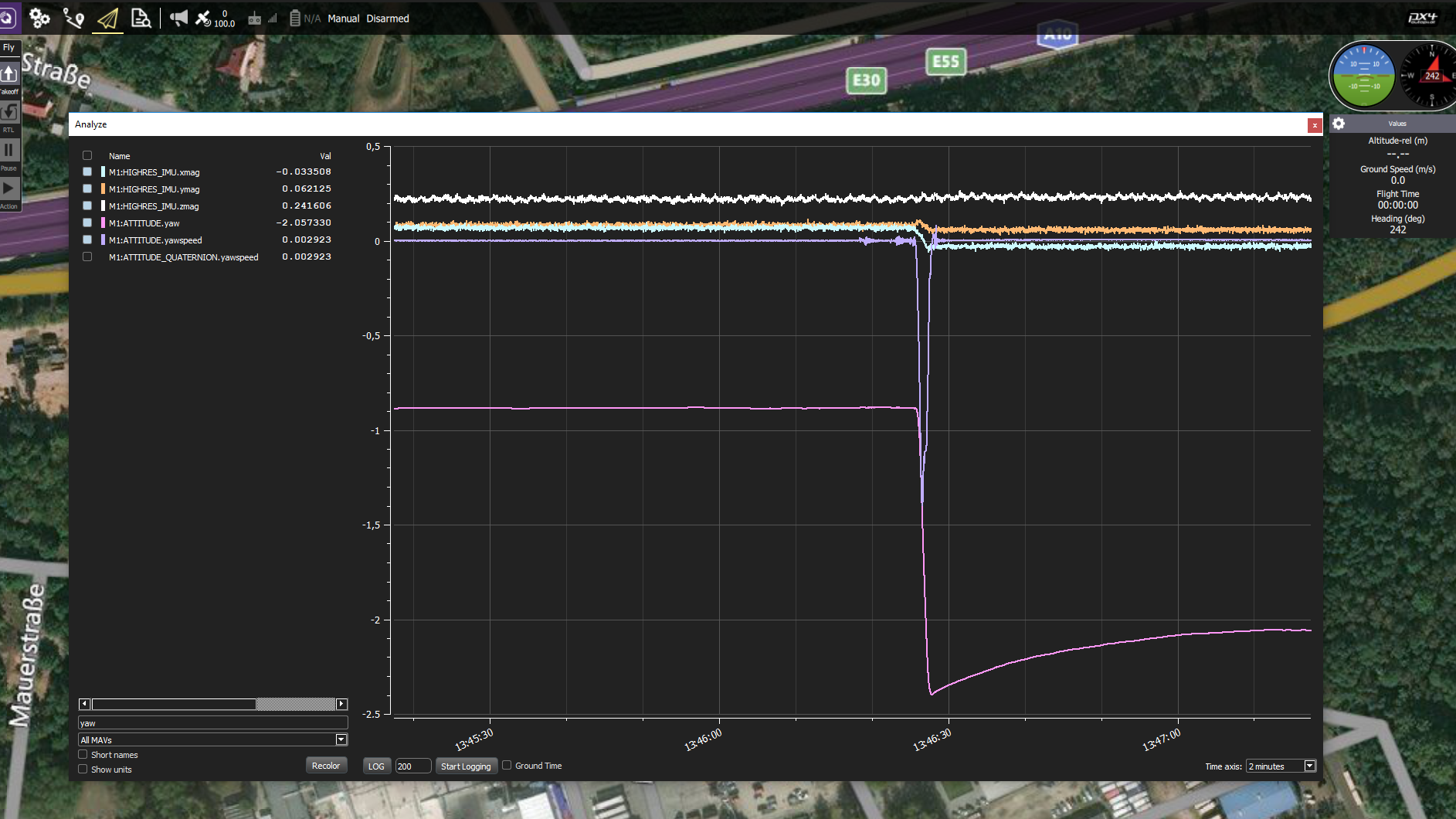
I added a picture of the live Datafeed from the QGC Analyze widget.
As you can see i made just a normal turm with the AP on my Table and the Yaw-Value is starting to drift away after the turn. (Turn was around 90°) but the sensors aren`t indicating any turning.
In the picture are showcased just the IMU-mag values but gyros and acc are all quite after the turn (no turning indicated)
What cahnged? The Ap is now recognizing the external compass in the GPS-Module. But the problem with the drift still exists even in the new hardware. Got some MAG INCONSISTECIE error messages but recalibrated and they are gone.
i found two things that are related to this problem.
First is the rotation speed at the mag calibration process. It seems that i turned to fast and got this problems. I reduced the turningspeed so that i do max one turn per calibration step for the magnetometer and the result was in an acceptable area.
My second observation is the temperature of the IMU even if i use an external compass. The Pixhawk 2.1 has a heated IMU. The nominal operation tempereature of the Pixhawk 2.1 is around 52°C and it takes around 12-13 minutes to reach that. When you calibrate the compass right after startup you get a hugh temperature drift which seems to influence the problems.
On a side note: The Pixhawk 4 IMU get`s up to around 40°C and takes around 10min to get there.
The “temperature drift” could be resolved with a proper thermal calibration but i don`t have the possibilities to do that right now.
we could improve the yaw drift from a angular deviation of more than 40° to around 1° with both measures used. (Warm calibration + slow rotation at the compass calibration steps)
But we still need to test this further the see how reliable this is and after which temperature change (air temperature) the problems start to occur again.
Also a part that i find anoying is that you have to wait around 10 min for the IMU to heat up. it really stretches operation times by at least 50%
We found maybe the rootcause of the problem. It is indeed the temperature as suggested in one of the previous posts. As we were last week out in the field for some test and we had some smelting hot sunshine our little Pixhawk 4 got a bit hot (around 60°C) and the drift was there stronger than ever.
We tried to calibrate the sensors and the drift was gone for the time of the fieldtest.
After being back at the office with the AP on the table at room temperature (still 31°C) the drift reoccured!
Conclusion --> Thermal drift of the Accelerometers and the Gyros.
I tried the Thermal Calcibration as described in the user manual and will test how it works (or if it works) and maybe will opne a new topic in the calibration section if i have further problems with it.
Hallo, everyone.
I have the same problem with yaw drifting on two pixhawk models.
The problem occurs without activating any motor or increasing the temperature too much.
Did you solve your problem ? Any suggestion would be wonderful.
the temperature calibration did it for me in this case. You also must note that you begin your startup at room temperature and the hardware will then selfheat itself to well above 50°C. So frome there comes the temperature drift.
If you need further advise just post again here. I want to have this information as public as possible since there seem to be some people with this problem and any guidance is good for the community.