I have a question because the quadcopter is moving strangely. I’m using CubeOrang and here3 GPS. When flying after completing all the calibrations, the quadcopter was rotated in the yaw direction in stabilized mode. The control signal did not input anything other than the throttle. I will attach the flight log.
Does anyone know a solution to this problem?
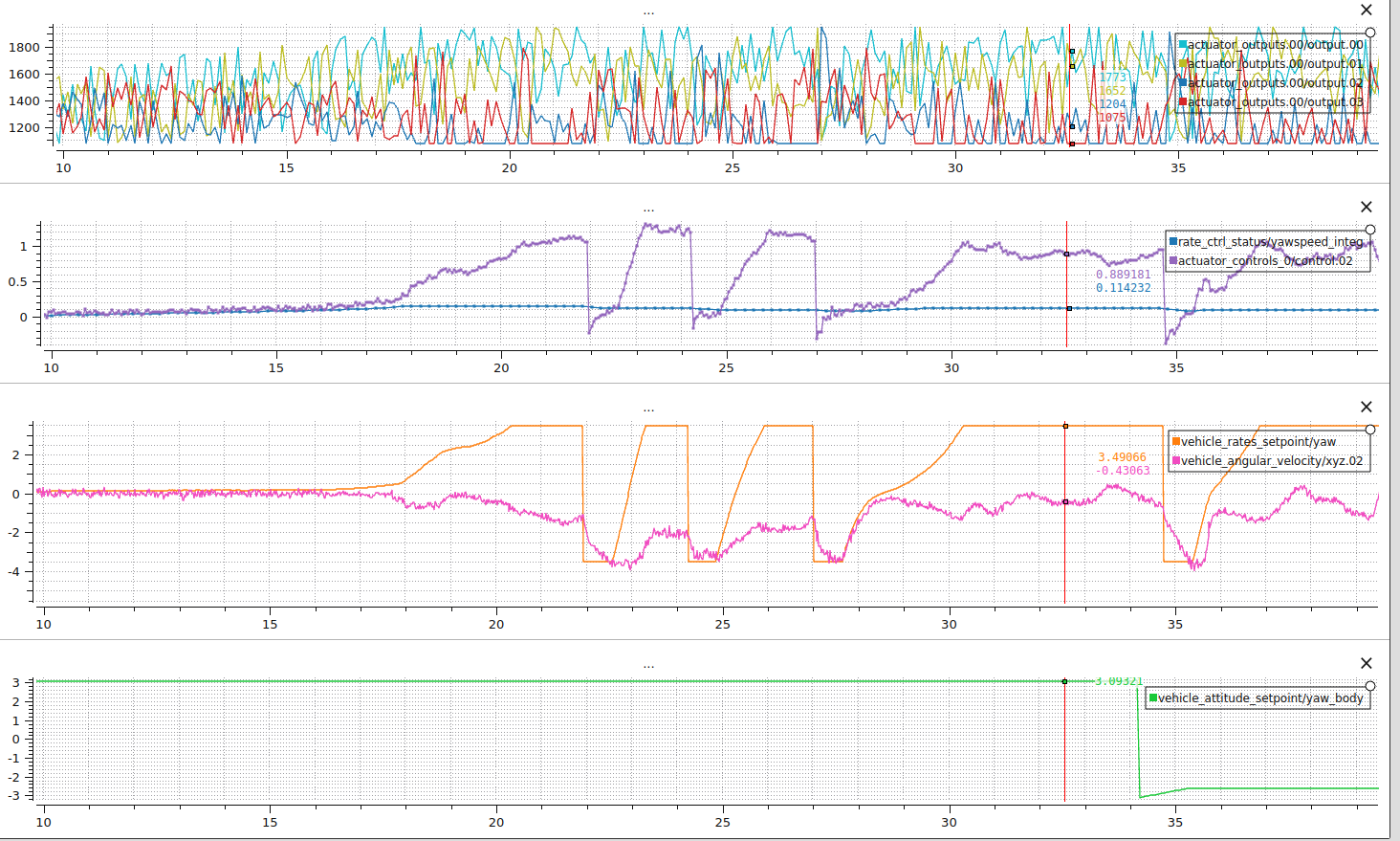
Your vehicle seems to be not yawing at all (32.566 mark above), even with almost maximum (0.88, which is 88% of the yaw torque you can exert) yaw torque setpoint (actuator_controls[0].control[2]).
This leads me to believe that perhaps your multirotor has one of the propellers spinning in a wrong direction, and thus can’t control the yaw properly.
Question
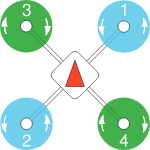
Can you check whether the motors rotating direction & propeller mounting is all as expected?
I had a similar problem recently with a large hex copter running a Cube on ArduPilot. It flew just fine, but would slowly spin. The problem went away after I ran a full recalibration (accelerometer, radio, compass, and ESCs). I doubt all of that fixed it… but it may have been one or two of the above items.