I’m looking for some clarification on how to set up Telem ports. I want to set up Telem-2 as MavLink for a Holybro OSD module.
I’m a little confused by the documentation - it seems both the “ser_xxxx” parameters and the “mav_nnn_xxxx” parameters are involved.
On my test platform, by default Telem-1 is enabled - and functions properly with a SiK radio - mavlink.
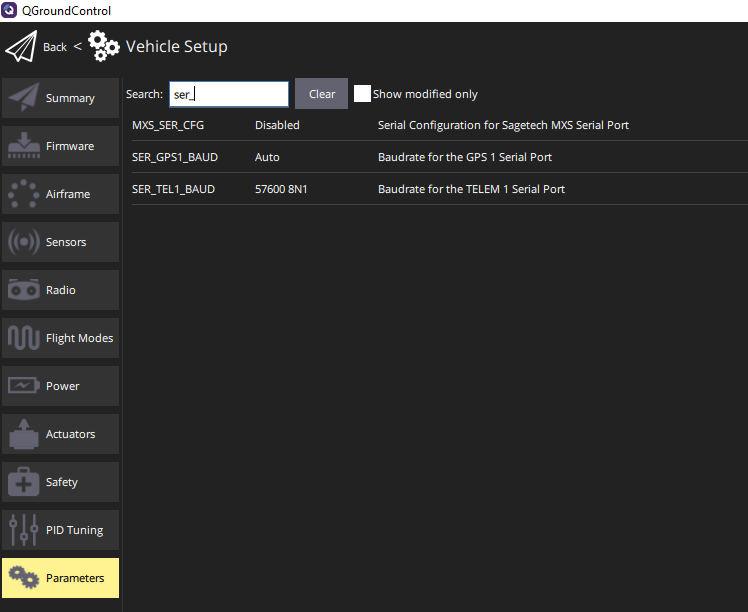
There are no “ser_tel2_xxx” parameters available however for Telem-2. (or others for telem-2)
My guess is that I have to use some other parameter to enable the Telem-2 and associated parameters.
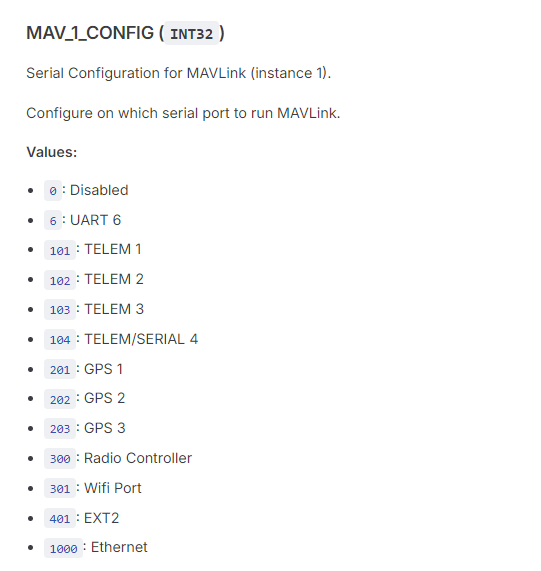
Maybe MAV_1_CONFIG will do this.
Of course if I wanted to use Telem-2 for some other purpose than MavLink - there might be some other way.
Can someone please point me to the proper documentation on how to configure the Telem ports?
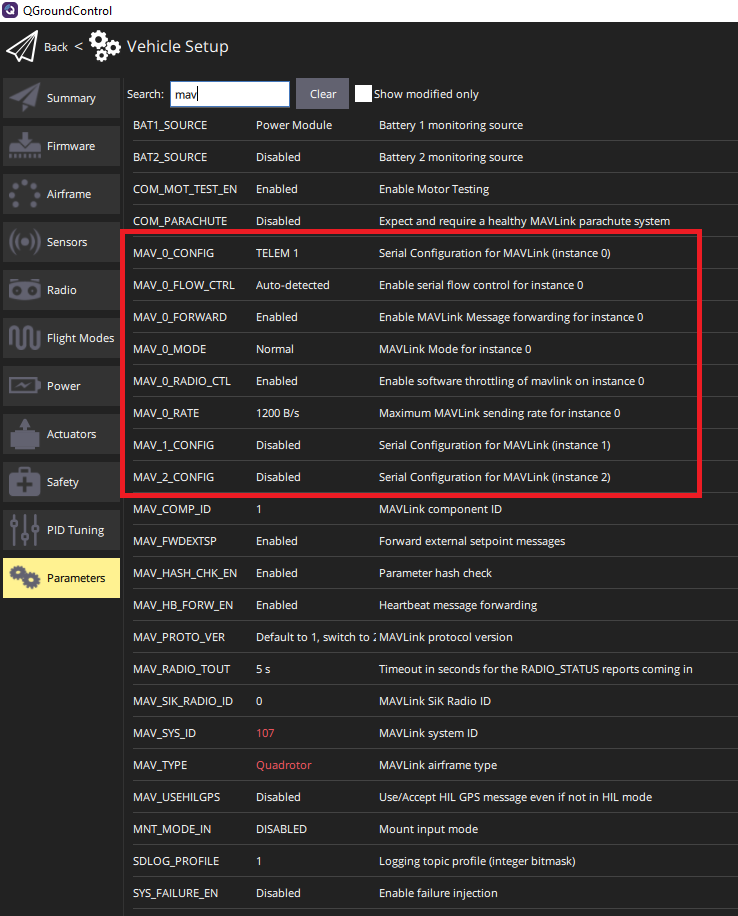
Here’s what I have now:
Thank you!
Hi! @Jstroup
Yes you are correct! MAV_1_CONFIG will do this!
This sets up instance 1 (note the counting starts at 0) of the mavlink connection on the flight controller. Parameter Reference | PX4 Guide (main)
Once the parameter is set to Telem-2, the other telem2 parameters should appear (it maybe after a reboot if I remember right). Once you see the parameters you should be able to set the baud rate: Parameter Reference | PX4 Guide (main)
Hope this helps!
Thank you - yes, I appreciate your confirming what I suspected.
Just to reiterate - any use of a telem/serial/uart port must first be defined using a MAV_nnn_xxxx parameter.
And the available options for a telem/serialuart port is as follows:
Once again - thanks for your help!
Just to reiterate - any use of a telem/serial/uart port must first be defined using a MAV_nnn_xxxx parameter.
And the available options for a telem/serialuart port is as follows:
Yes! Both statements are correct!
1 Like
To do this you should enable MAV_1_CONFIG as TELEM2 as you said. After than you can configure SER_TEL2_BAUD according to your hardware after reboot.
If you want to use serial ports for other purposes, looking sensor drivers is a good starting point I think. You can use serial ports just like communicating between any serial interfaces like arduino to arduino. You can check driver development document here
1 Like