Hello,
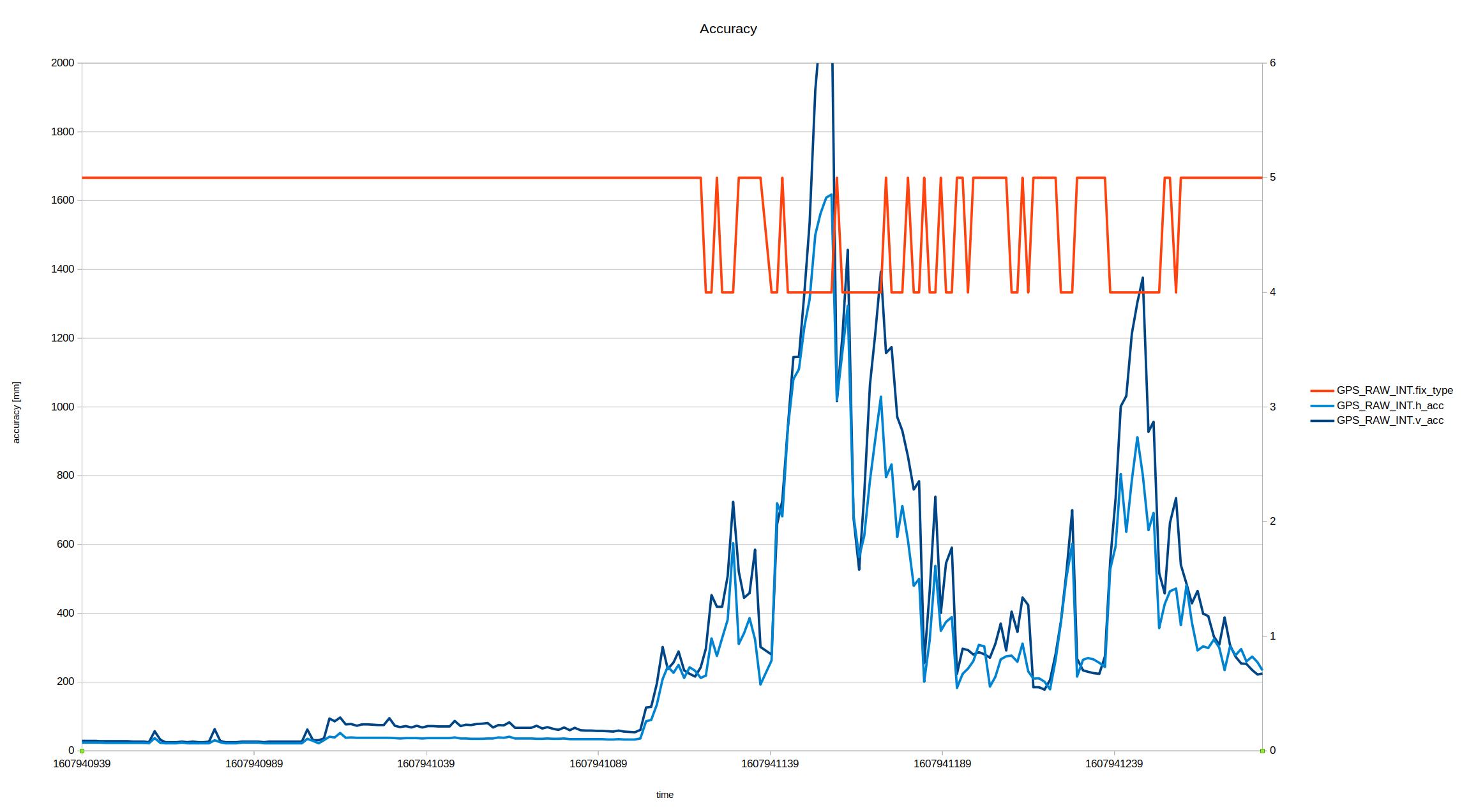
I’m using a RTK GPS and until now I just assumed as soon as the RTK Base was streaming it would work. But after analysing the GPS_RAW_INT MAVLink messages I realized most of the time the RTK Hover GPS didn’t even use the RTCM messages. The GPS type changes between 4(DGPS ) and 5(RTK fixed float), where as 5 is only present for one messages every 30 messages I would say.
Shouldn’t it accept the streaming messages and say type 5 for all the time? And if not do I have to change some settings, as I thought it is plug and play?
Thanks.
Having same problem. The RTK is streaming but the GPS is type 4 for most of the time. Did you find a solution yet?
No, the only option I could think of is to update the software of the RTK Base station / RTK Rover.
Maybe they are running on different versions and therefore don’t match. But I don’t think it’s the solution as the Rover sometimes accepts the RTCM messages meaning they have to match.
Another thought I had is that maybe the Rover does’t accept the messages as it somehow thinks they will decrease its accuracy. But that doesn’t really make sense aswell, so I’m kind off clueless.
So now it works and I think the cause was the low bandwidth of the 433Mhz Antennas I was using to transmit the RTCM messages.
Now I switched to MAVProxy and everything works without a problem.
Thanks for posting an update to your question, could you do me a favor and mark your comment as the solution?
Could you also please explain how does MAVProxy fits into your overall architecture?
So I’m using a Jetson TX2 as a companion computer with MAVProxy installed. It fits perfectly in the overall architecture. The reason why I switched from the 433MHz antennas to MAVProxy was the unreliability of the antennas. First of all the RTCM messages which didn’t get passed correctly and also the problem where the antennas always show a red light (firmware update mode) during power up.
Glad to hear MAVProxy is working out well for you. If all you need is to move direct MAVLink towards multiple consumers, you can look at the mavlink-router