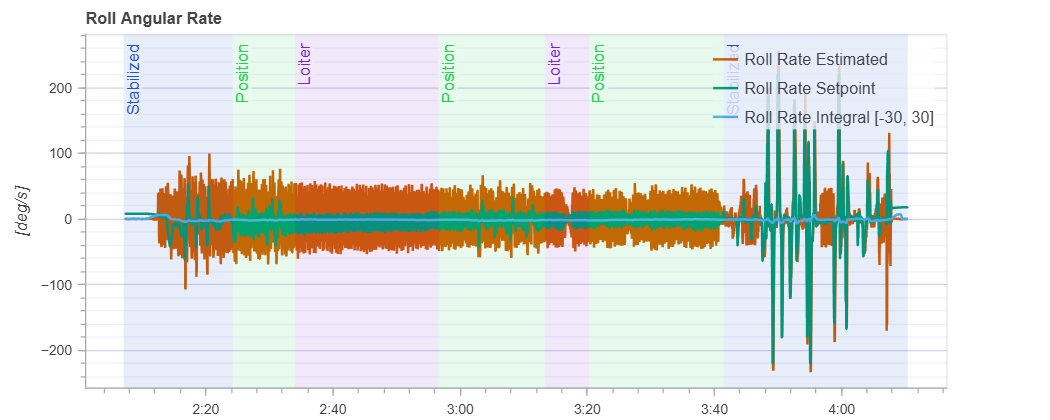
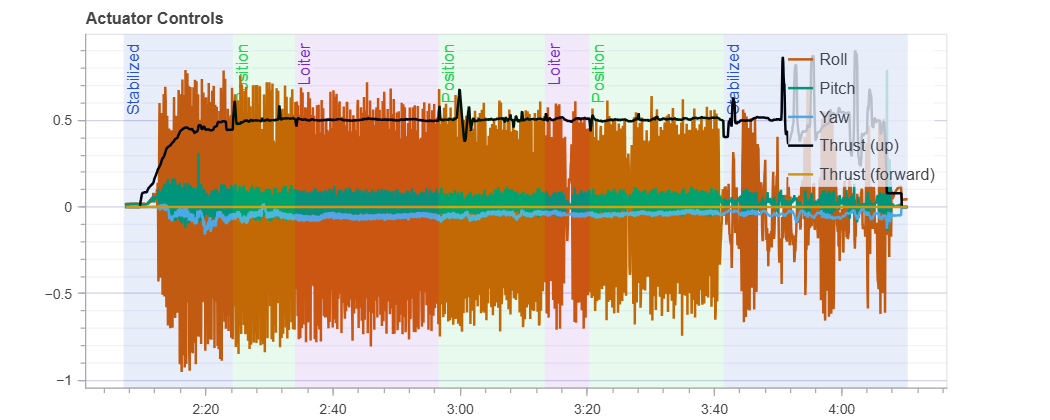
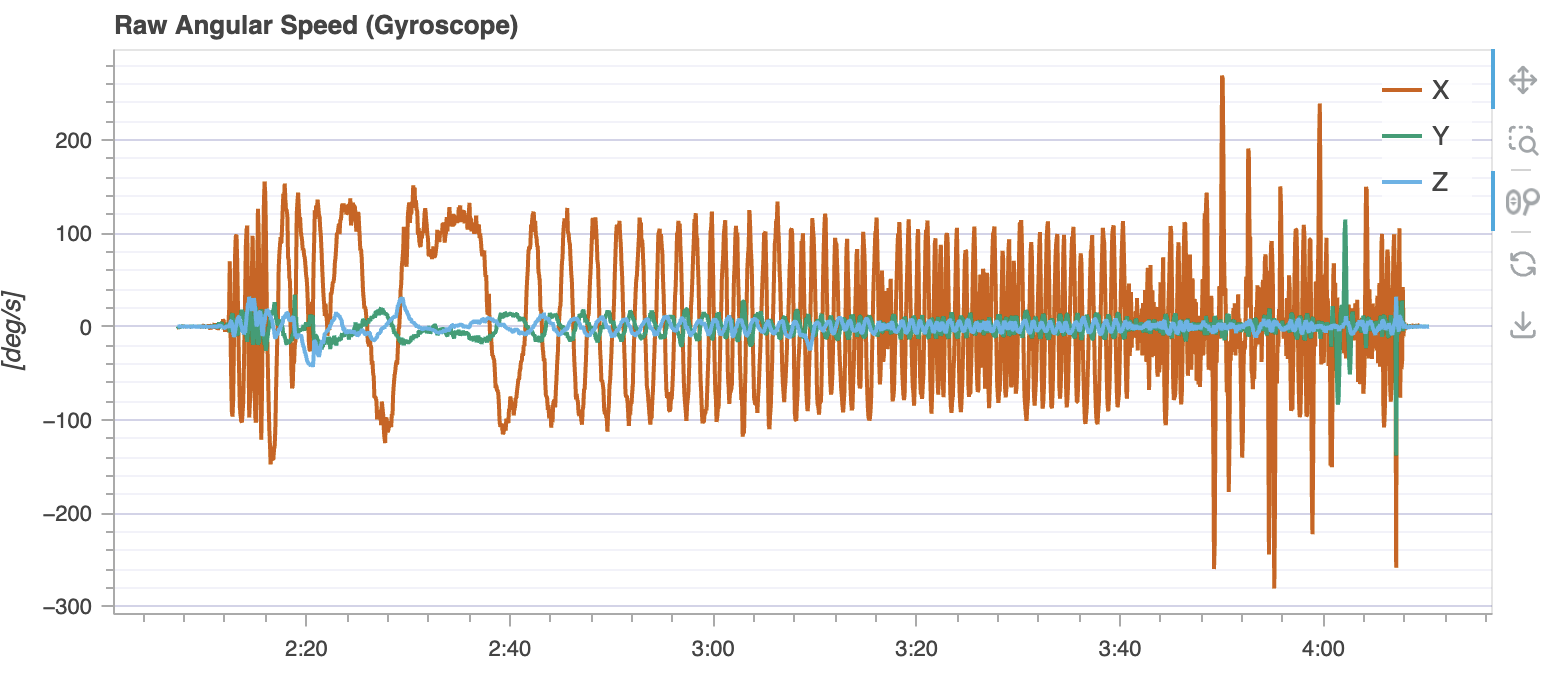
I’m having problems with a Holybro S500, Pixhawk 6X flight controller, PX4 v1.15.4. What I see appears to be a high oscillation on the roll angular rate, although whether that is caused by a faulty sensor or induced by some kind of feedback in the control loops I have no idea. Probably related: the motors get really hot and the battery life is severely reduced. Some plots from the logs:
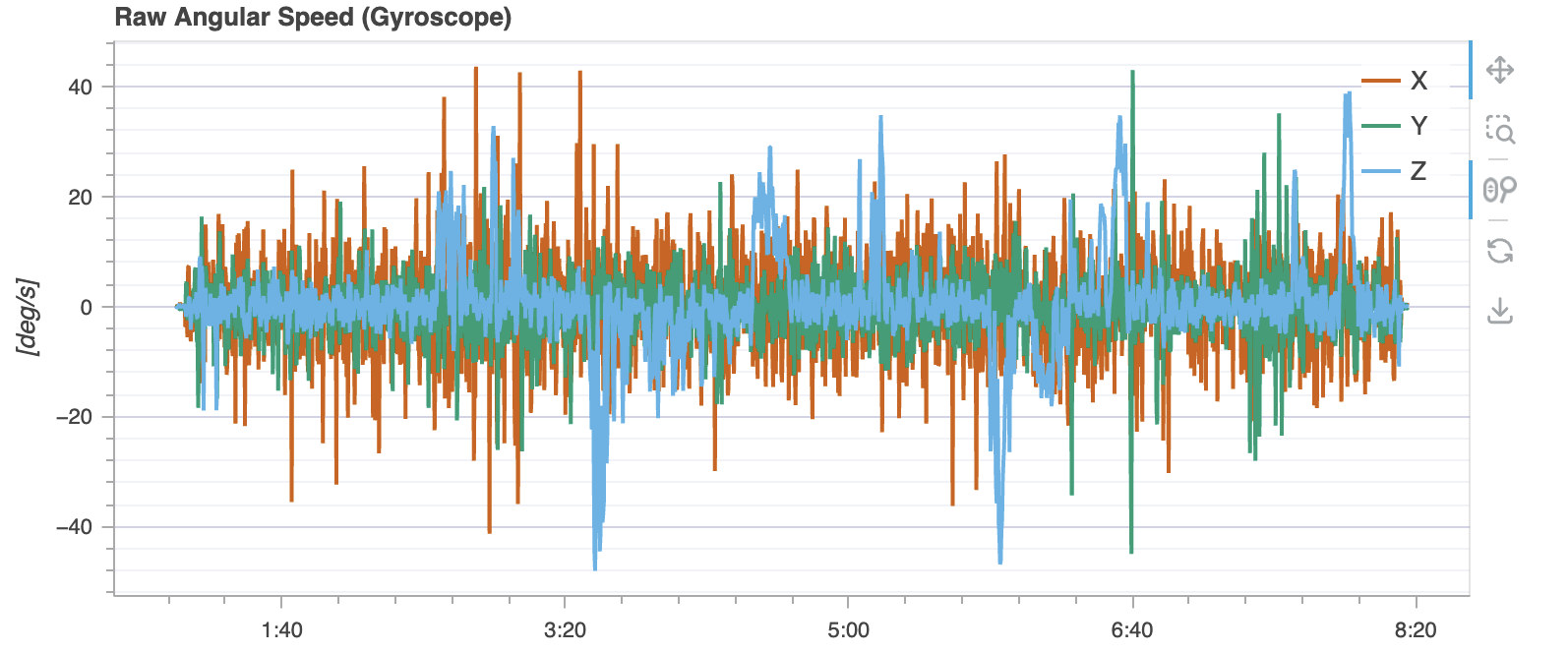
The flight controller that exhibits the roll angular rate oscillations is a Holybro Pixhawk 6X, an upgrade from the 6C the drone came with. I put the 6C back on the drone and the problem went away. Here are two flight logs recorded with the 6C:
Since the same set of ESCs was used in all flights of both 6X and 6C, it seems the problem must be something about the 6X.
I have been flying with the default parameters for the Holybro S500 airframe, no PID tuning or anything.
Note that the vertical scale on the 6C is +/- 50 deg/s and on the 6X it is +/- 300 deg/s. Also the X axis rotation rate really looks like it is oscillating.