Hi
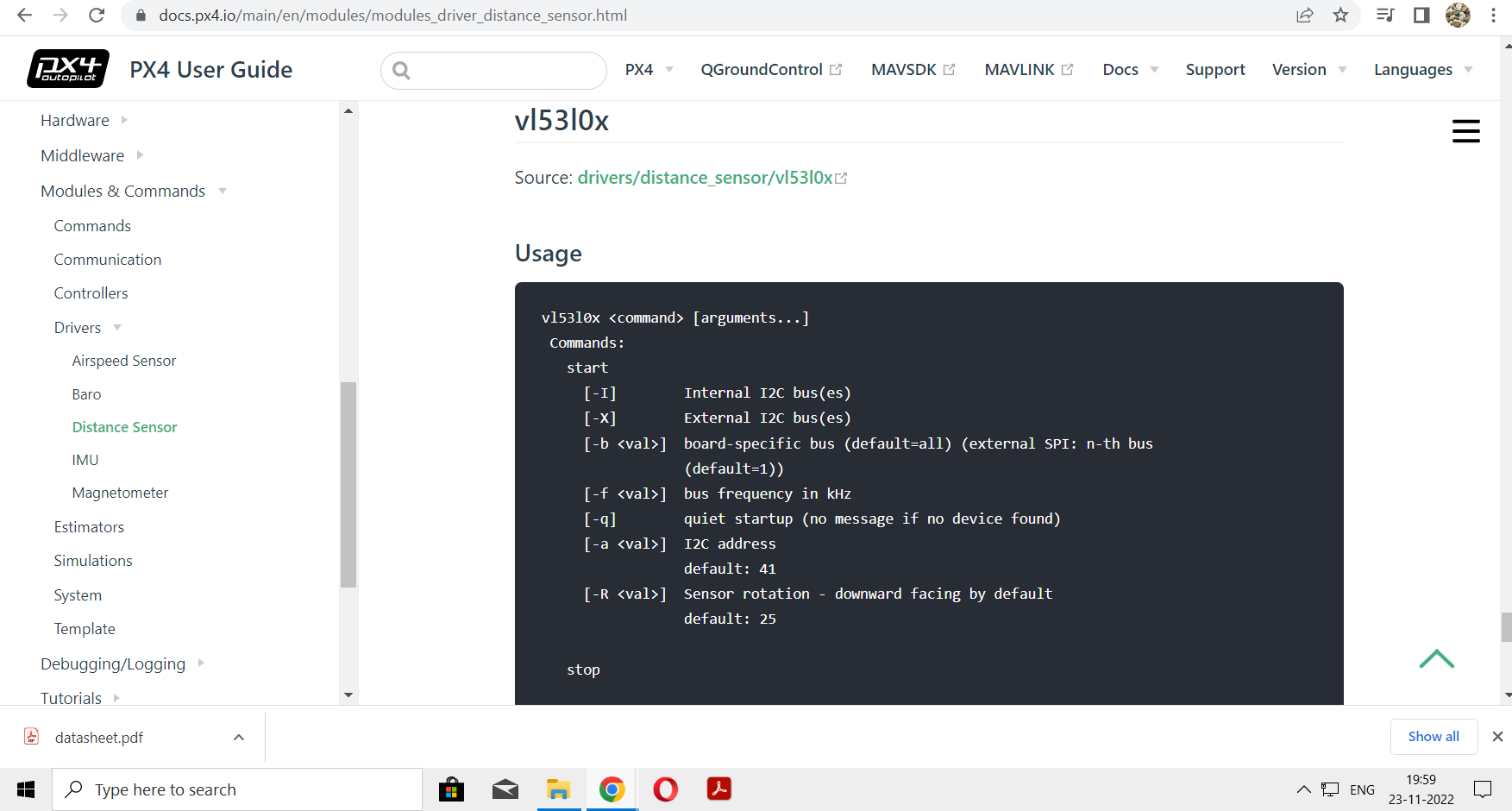
i see this parameter list indicates vl53l1x distance sensor. The one I am currently using is vl53l0x sensor.
Were you referring to the parameter " SENS_EN_VL53L1X
Also i tried to run this sensor using RasPi 3b+ with no success. I will revert once i am sure it works with Raspi.
I am assuming here that there are internal pull ups enabled for the i2c port on the Orange CUBE. I have measured 5v as power from i2c port of the CUBe and 3.4V from SDA line . .
I would check what the the difference is between the two sensors. It could be that they have a different WHO_AM_I (or other device id). If so, then you’d have to adapt the driver a bit.
I confirm here that my distance sensor works fine but we have to use the command vl53l0x START -X command thro’ mavlink console every time . What other parameters should I enable or edit to make it obstacle sensing.
No. I am not building my own firmware as I don’t know the setup of these custom firmware.
Where is the " px4fmu_common/init.d/rc.sensors " . Is it on the SD card of the Orange CUBE f.c or do I need to custom compile the firmware !!
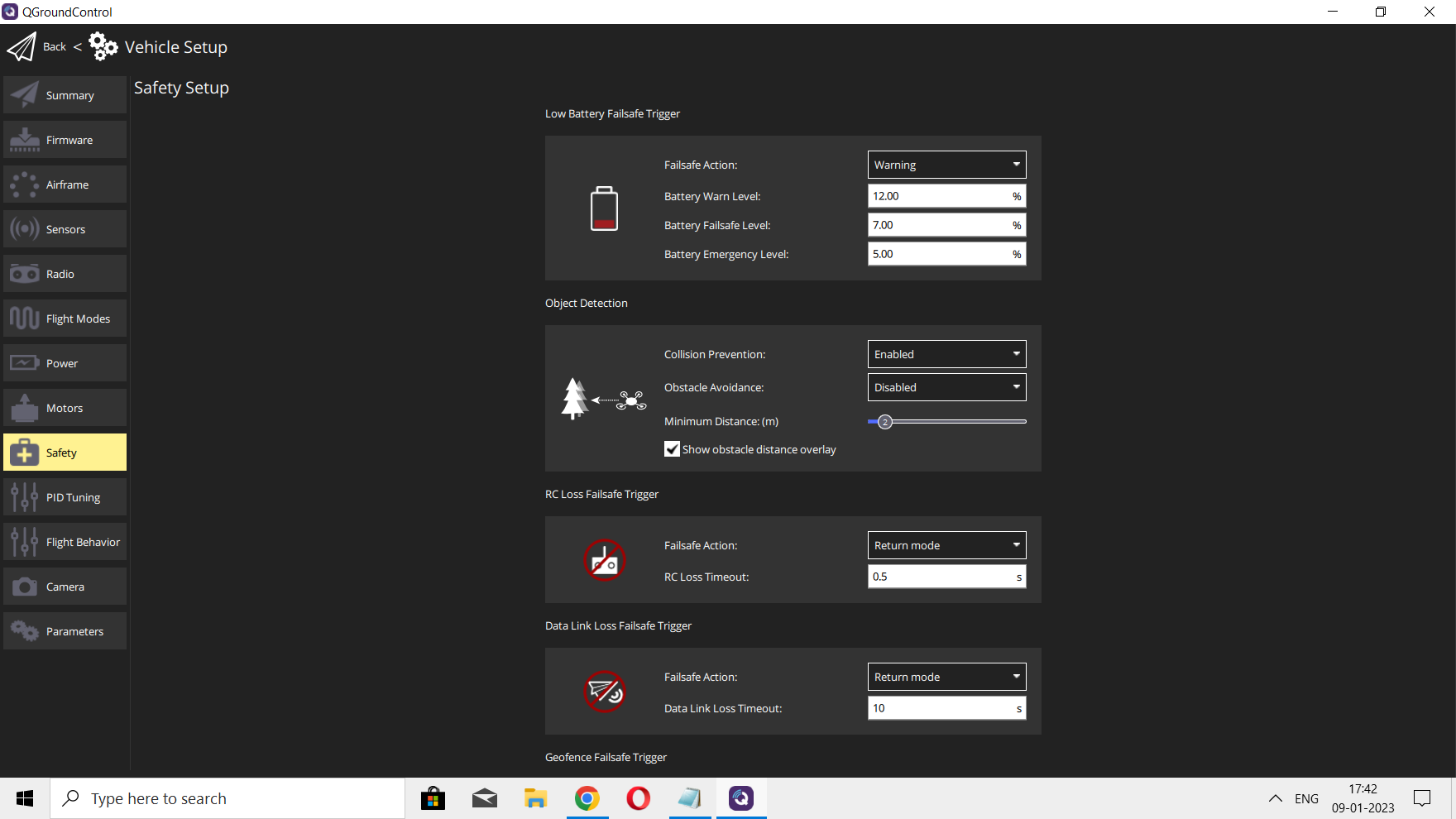
Also i am not able to see the parameter MPC_COL_PREV_D to enable collision prevention in QGroundControl GCS . In this case what is the use of the VL53l0x sensor
yes of course…let’s go public…we need your support on this as i am still hunting for a solution…i will try out your file creation and will be back in few minutes from this moment
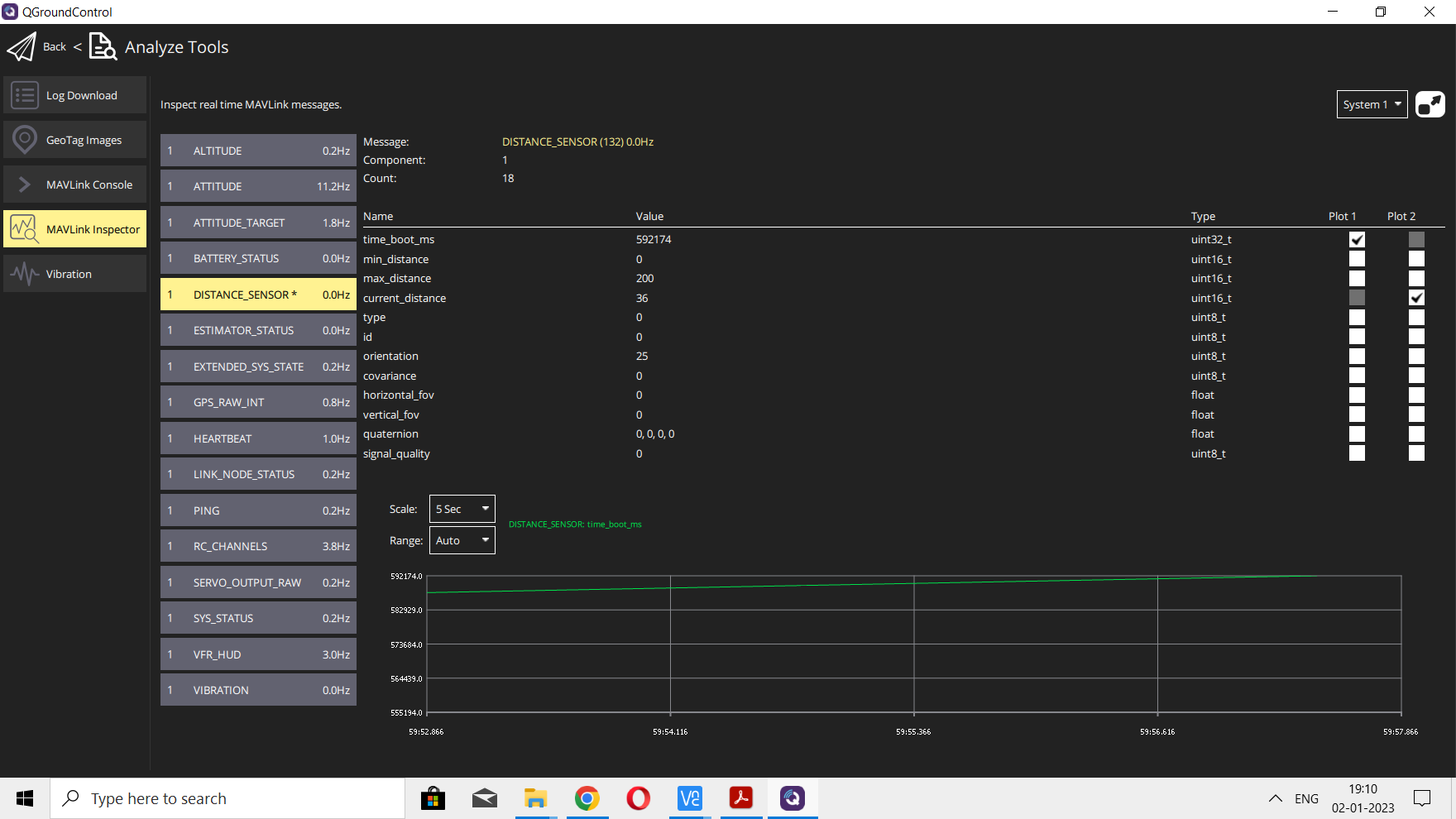
Your start up script under /etc/extras.txt solution was not working initially … But when i removed the .txt from the filename and renamed it as extras , it works !! I could see the distance sensor graph readings.
Now the next question is while check listing the collision prevention and obstacle avoidance under QGroundControl safety menu , the drone doesn’t take off. it says obstacle sensing is not configured. i unchecked the obstacle sensing , the drone arms but it is not doing the collision prevention in POSITION flight mode … … What other parameters should i input from here .