@baumanta above is a question regarding obstacle prevention using a lidar. Is this something that should/could work?
I was not following upstream closely recently. I remember that the collision prevention was not supported by the new position controller and there were tasks about getting rid of it. But I don’t believe that happened. So I think if you are using the old position controller it should probably be working.
Hi
What you mean by old position controller. Which px4 version are we talking here.
Why did the dev team remove such a much required safety feature for a drone.
Is there a different safety concept to replace collision avoidance feature
A year ago, I tested the collision prevention feature with MPC_POS_MODE=4 (default, Acceleration based input). It did not work, so I tried to change the param to MPC_POS_MODE=3, and it works fine as expected. However, the handling quality and overall response are lower than the default POS_MODE.
1 Like
Hi there ,
Will check this out and revert back. This is good info.
@ saengphet…Unfortunately it doesn’t work on my Px4 v12.3 version. i have a CUBE orange with QGC as ground control software. I am curious to know what is the description for MPC_POS_MODE=3
thanks
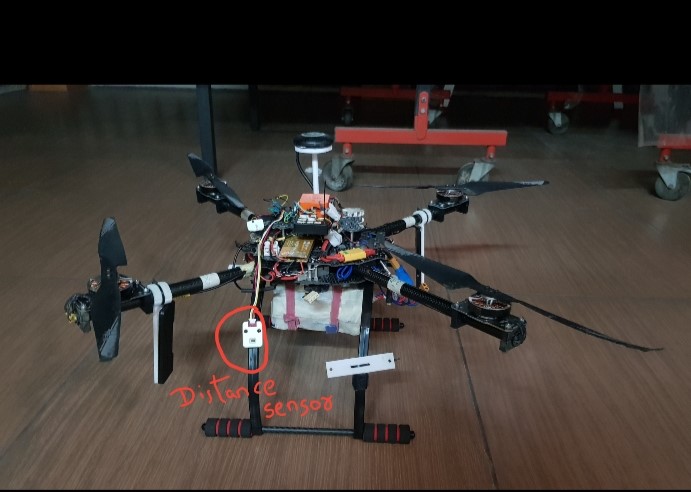
@sibujacob Have you checked the distance sensor direction by using QGC indicator (set to pitch270degree = downward)? I use the lightware LW20/C lidar with the added command “lightware_laser_i2c start -X -R 0” to make the lidar look forward. However, I forgot what firmware version I used.
1 Like
@ Saengphet my vl53l0x is having default at 25 degree . which means facing downwards. Can you tell me how to change this to forward direction from Mavlink console
@sibujacob If it already started, try to stop it first using " vl53l0x stop ", then input this command: " vl53l0x start -X -R 0 ". Please check in QGC indicator by distance sensor with ROTATION_NONE.
reference distance sensor orientation:
1 Like
Just wanted to know whether we require GPS lock for this distance sensor to work ? It is night in my location . if GPS is not required, i could try it inside.
The distance sensor reading after your feedback on QGC indicator
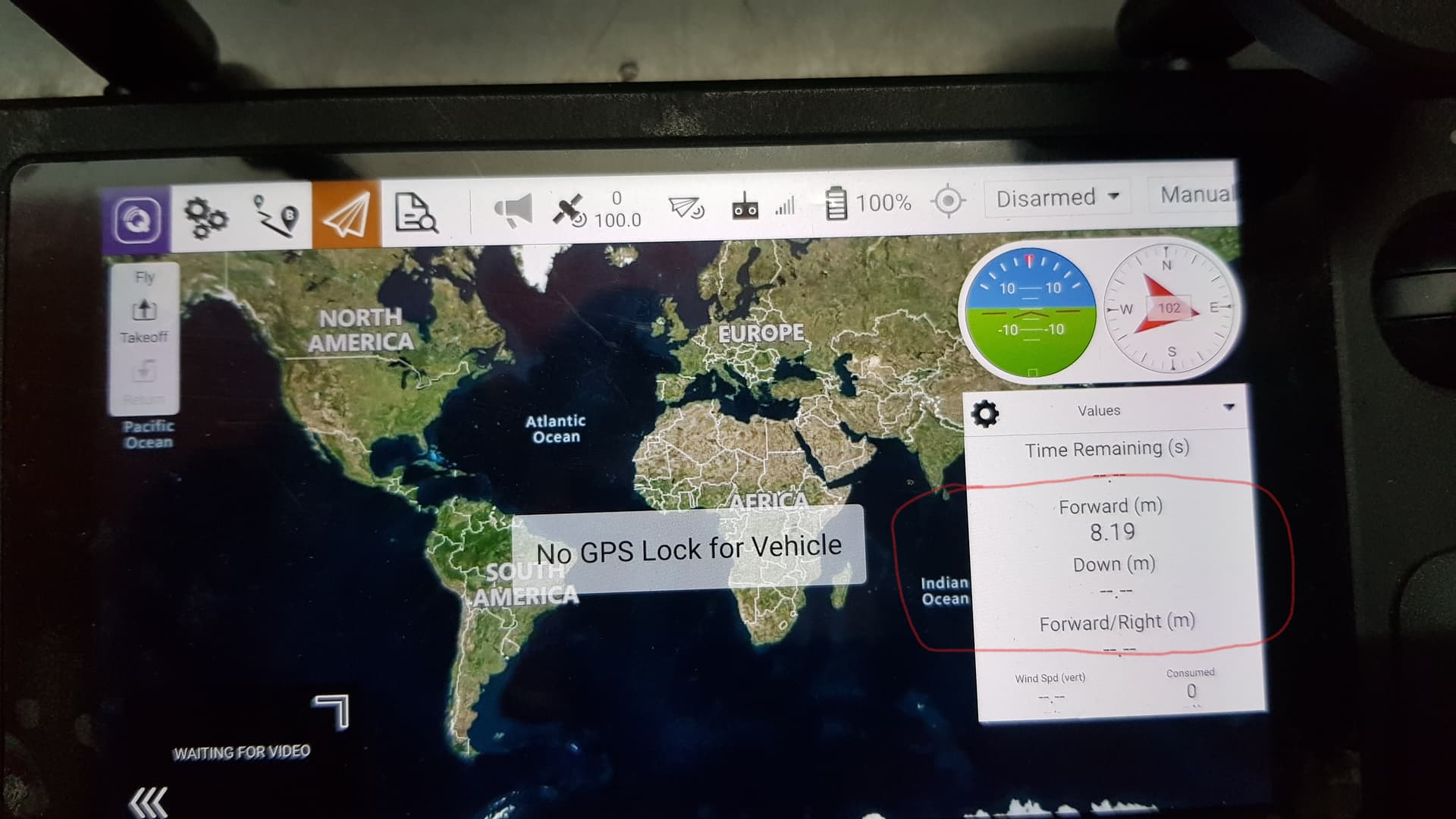
I tested in prearm mode It measures from 0m up to 0.5 to 0.56 m and then jumps straight to 8.2 m !! Why does it do that ? I still haven’t tested the collision detection in flight due to night time here
@sibujacob The position (either global via GPS or local via VIO/SLAM) is required by the collision avoidance system. To function, the drone must be in position hold mode. Concerning the distance sensor error, I’m not sure what the underlying cause is. I recommend that you validate the distance by pointing the sensor at a flat wall and comparing it to the true distance value (and the spec sheet too). I have never used the VL53I0x before.
1 Like
thank you for your valuable feedback. I will check this and post the results
@saengphet … After doing a test as per your recommendation, the drone doesn’t do any sort of collision prevention !
What I also saw during flight ( Position mode ) while close to the wall , the sensor doesn’t do any ranging either. But in pre arm on ground, i see the sensor ranging as I described earlier. i had placed the sensor at 1 meter minimum distance . The VL53l0x has a range from
0 m to 2 m.
Strangely the distance sensor graph show up on the flight review !!
