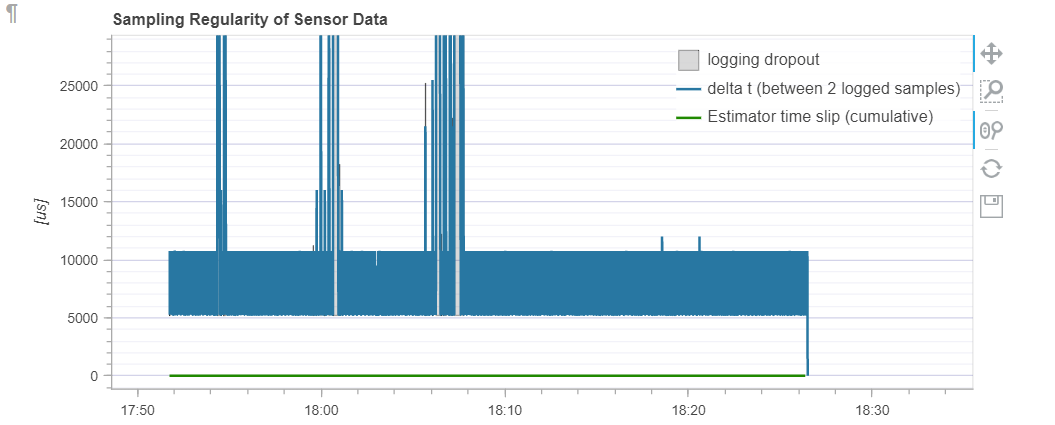
I find it interesting, this is from a flight with ekf_ev_delay = 0:
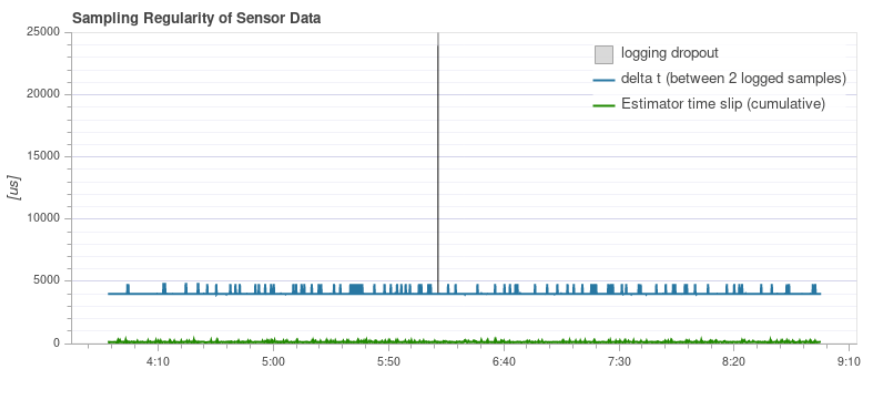
I see from normal well working flights (other peoples ulogs) that delta t is like a normal line as from the px4 website:
when I set ev_delay = 20 it creates estimator time slip:
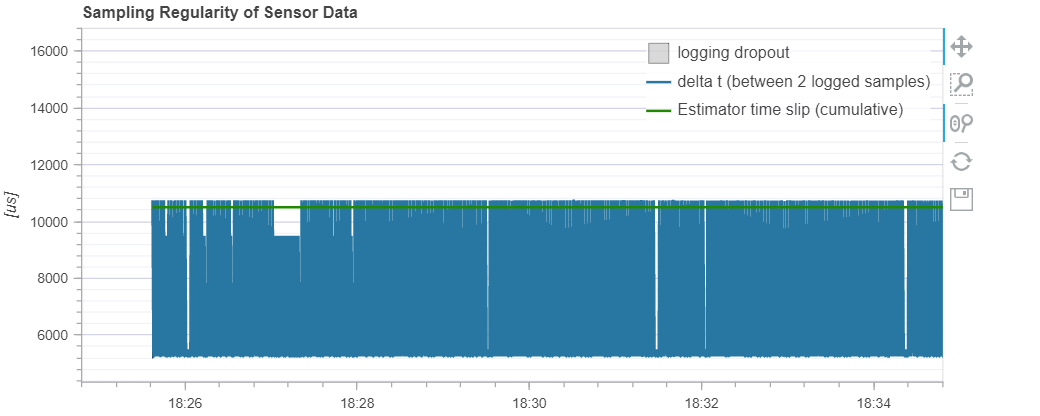
also with ev_delay=40
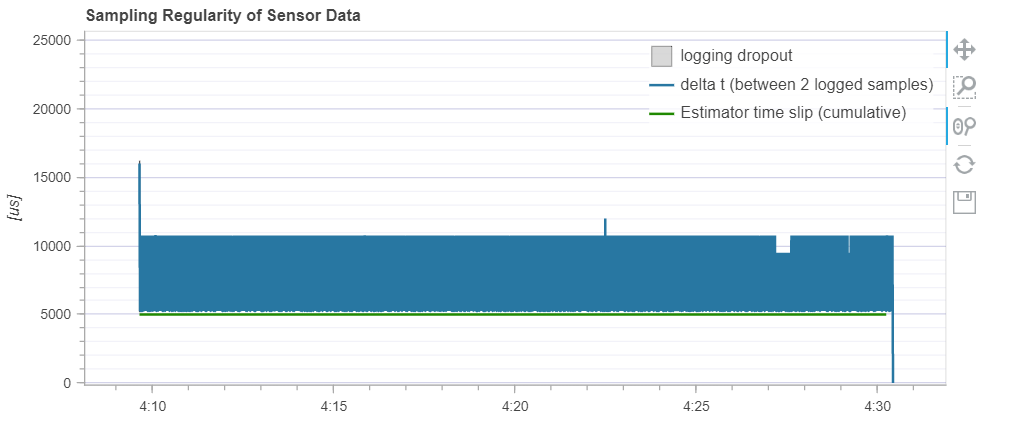
not sure what this means but it cant be ideal