I am running the px4_ros_com applications: Sensor Combined Listener and Vehicle GPS Position Listener. They are available to see under px4_ros_com_ros2/src/px4_ros_com/src/examples/listeners.
I am expecting to see text output of the data upon running the applications but I do not.
I am using the CUAV V5+ flight controller and running PX4 version v1.12.3 and px4_fmu-v5_rtps on it. I have connected the flight controller to my Ubuntu 20.04 laptop via the USB port and by the DSU7 debugging port using a serial-USB converter. I access the debugging port using the following command: screen /dev/ttyUSB0 57600 8N1
In the debugging port I start the Micro RTPS client with the command: micrortps_client start /dev/ttyACM0 -b 115200
In another terminal, I start the Micro RTPS Agent with the command: micrortps_agent -d /dev/ttyACM0 -b 115200 -v
And then I wait around 10 minutes for received messages to be accumulated in the agent.
From the screenshot below you can see the agent sends and receives messages:

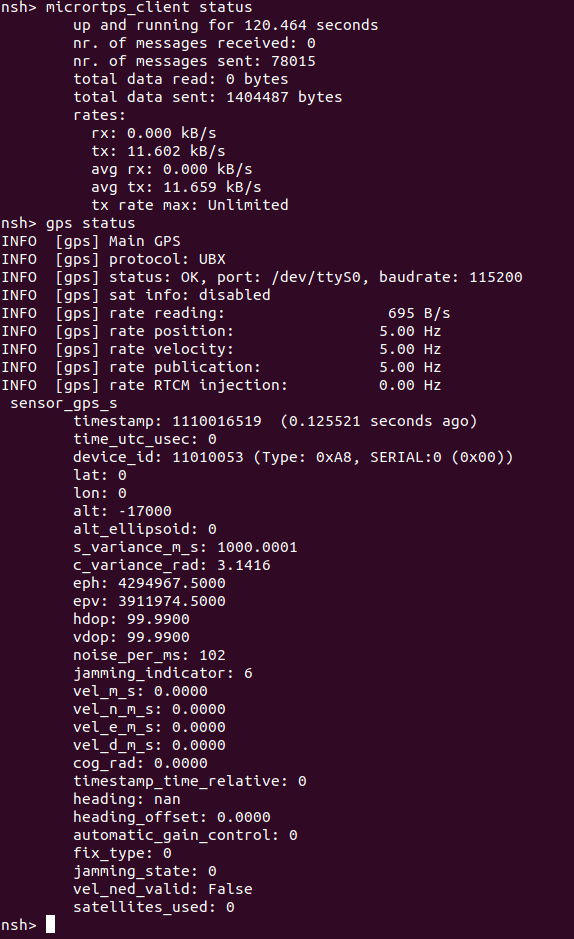
The flight controller is definitely outputting GPS data and Sensor data as you can see below:

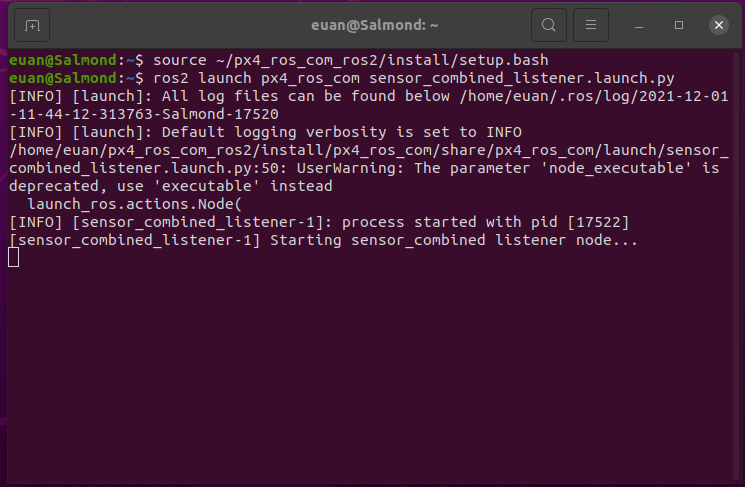
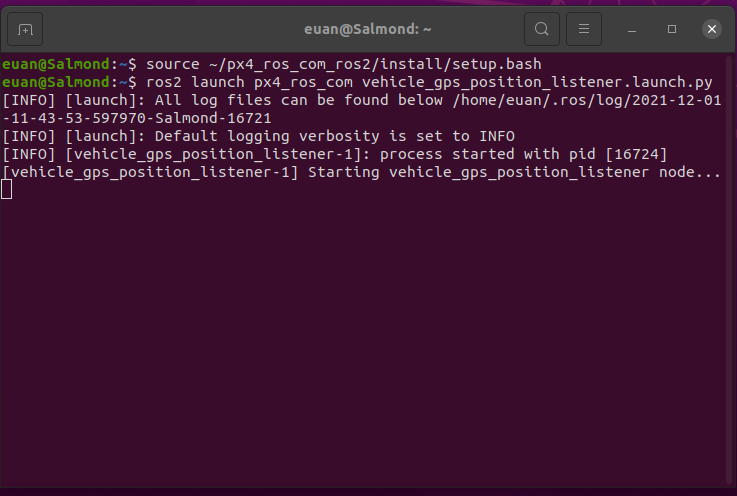
But the Sensor Combined Listener and Vehicle GPS Position Listener applications do not receive anything:
From doing cat /dev/ttyACM0 I can see that data is definitely being sent/received on this port.
I don’t know what messages the Agent is receiving exactly but if someone could help me in finding out that would be great. And could someone help me to figure out why the Sensor Combined Listener and Vehicle GPS Position Listener applications don’t receive any data?
 and you too have a nice day
and you too have a nice day