A fixed-wing aircraft is being tested on the GAZEBO simulator.
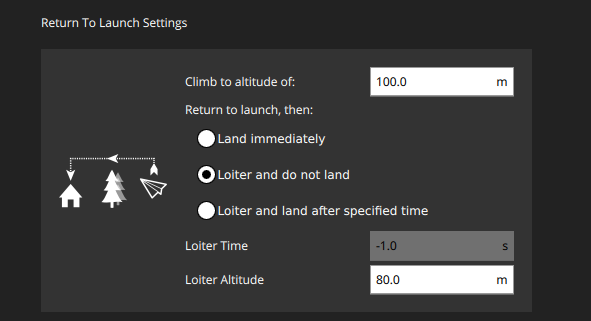
In the safety menu, the Return to launch setting was set to ‘loiter and do not land’. Created an RC loss situation. But it doesn’t keep the loiter altitude 80 I set.
And when it reaches the landing altitude set in the mission, it starts landing.
Was this fixed?
Because I tested today (29th July) with PX4 v1.14.0 and with v1.14.3 on SITL and I am still getting the same response. The fixed-wing vehicle lands on every instance, even though the parameter is set to “Return to launch, then Loiter and do not land” (RTL_LAND_DELAY = -1).