Hi.
Being new to PX4 (quad), when flying missions I cannot avoid the quad stopping at every waypoint, and don’t know if this happens by design or can be avoided.
These two videos show quad stopping:

(QGC tlog by MP)

(MP tlog by MP)
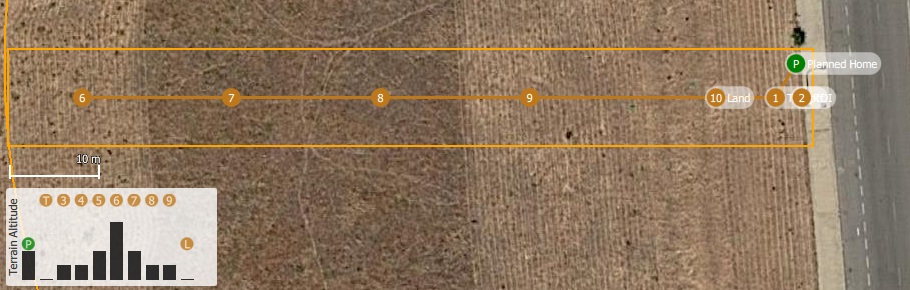
The mission consists in a few waypoints with constant latitude on a straight line east to west and then back (quad with constant orientation). On the tlog portion of both videos it can be seen that the roll changes when stopping:

Velocity on quad logs:
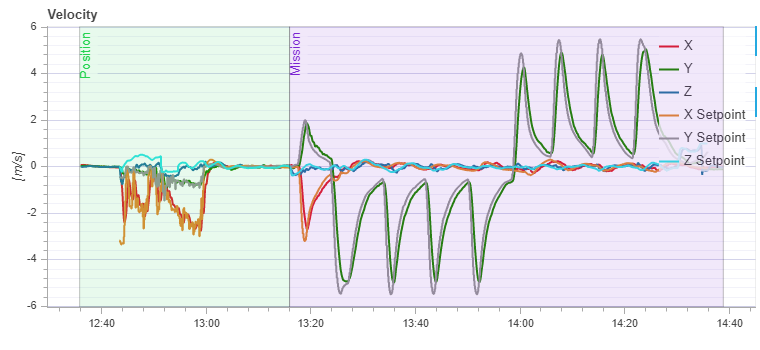
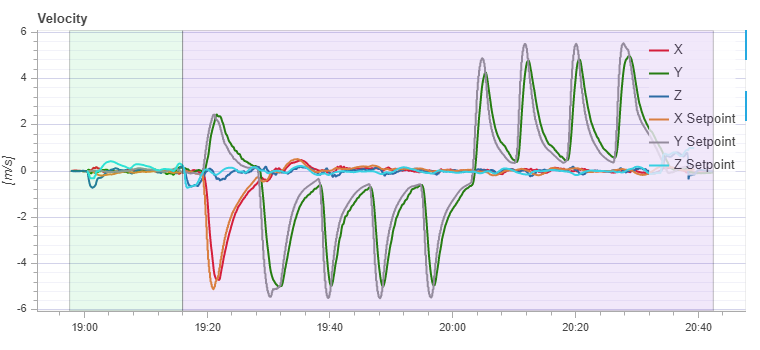
It is clear that when the quad travels to the west Vy goes negative and to zero at each waypoint, and when coming back it goes positive and to zero.
For MAV_CMD_NAV_WAYPOINT (16) param1 is a “hold time” but if it is zero it is not clear if it should stop or not. In ArduCopter it does not stop. Specifically, the waypoints (command 16) at the .plan file are as follows:
{
“AMSLAltAboveTerrain”: 3,
“Altitude”: 3,
“AltitudeMode”: 1,
“autoContinue”: true,
“command”: 16,
“doJumpId”: 3,
“frame”: 3,
“params”: [
0,
0,
0,
0,
40.31325,
-3.6741,
3
],
“type”: “SimpleItem”
},
maintaining latitude constant and varying longitude for the different waypoints.
What happens with PX4 on a car?
Observe this (ArduRover):

Obviously, for a rover on a circuit it would be absurd to stop at every waypoint.
How can I avoid the quad stopping at every waypoint?
This has been asked here:
Flight throuh waypoint without stopping in multirotor mode (march 6)
with no response.