May 18, 2022
Join us
Agenda
- Community Announcement
- Community Q&A
- Project Updates
- General Discussions
- Weekly Overview
- High priority queue
- Release
 Community Announcement
Community Announcement
uORB Explained Part 3 is out!
 Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions)
 Guideline for asking a Question
Guideline for asking a Question
- Specify what you are trying to achieve
- Specify what environment / platform you are using
- Prepare a Link or Document to help understanding if possible
- First ask the question on the Slack or create a Github Issue!
- If you take over 5 minutes for the question, please continue in Slack or a Github Issue.
Q.1 : GPS Jamming indicator not shown on QGC - Seppe
- Would be nice to have an indicator in the QGC
https://github.com/PX4/PX4-Autopilot/blob/master/msg/sensor_gps.msg#L24
- https://docs.px4.io/master/en/log/flight_review.html#gps-noise-jamming
- Repo where feature is added : GitHub - SeppeG/PX4-GPSDrivers at septentrio-interference-detection · GitHub
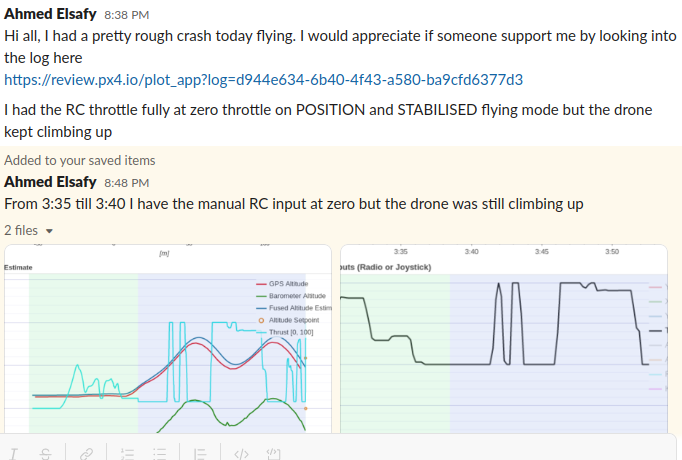
Q.2 : Wrong setting on Mixer (motor direction) confusion with Control Allocation - Safy
- Flight Review
- Using Control Allocation. Slack Message link
- Control Allocation Motor direction setup was modified via QGC, but the Mixer was confused as to which direction the motor was spinning, and yaw control was bad.
- Is there a way we can “catch” a bad configuration?
- Couldn’t bring down the craft
- TODO : Create an issue to analyze how it happened
- Capture the control allocation status
- https://docs.px4.io/master/en/concept/mixing.html
 Project Updates
Project Updates
P.1 : Web based Mission Planner / QGC - Fran
- Note : Dan Nix will be presenting on a similar topic, would be nice to sync with him
P.2 : Control Allocation User Doc is getting updated - Junwoo
- The goal is to make it easier for the user to configure the Control Allocation (Actuators)
https://github.com/PX4/PX4-user_guide/pull/1858
 General Discussions
General Discussions
D.1 : Fixed Wing Precision Landing - Ryan & Andrew
By having a GPS and a Barometer at the landing site, the landing coordinate can be pin-pointed. Currently the ‘Terrain Estimator’ is very unpredictable. Auto Landing is broken as well!
- Ardupilot Implementation : Ship Landing Support - Plane 4.2 - ArduPilot Discourse
- Github Issue : Auto-landing Methodology · Issue #9778 · PX4/PX4-Autopilot · GitHub
- Forum Post : Fixed wing auto-landing brainstorm
D.2 : Flash Overflow on Build Tests in the PR
- Targets like CUAV* can include a lot of code along with it, so it often overflows - Daniel
D.3 : X500 V2, with v5x hardware flight testing - Farhang
- Try to catch any weird behaviors / unusual beahvior
- Release v1.13.0-beta2 · PX4/PX4-Autopilot · GitHub
- David has a patches in NuttX that needs to be tested in couple of places
- TODO : Will put up a PR
 Weekly Overview
Weekly Overview
 Github
Github
Pull Requests
Architecture
- https://github.com/PX4/PX4-Autopilot/pull/19558
- Commander Arming State Machine Refactor Part 2 by MaEtUgR · Pull Request #19664 · PX4/PX4-Autopilot · GitHub
Navigation & Control
- Land amid mission by MaEtUgR · Pull Request #19659 · PX4/PX4-Autopilot · GitHub
- PositionControl: log individual portions of PID velocity control by MaEtUgR · Pull Request #19649 · PX4/PX4-Autopilot · GitHub
- Separate trajectory_setpoint message for ORB_ID(trajectory_setpoint) by MaEtUgR · Pull Request #19622 · PX4/PX4-Autopilot · GitHub
- Control Allocation: Tiltrotor improvements by sfuhrer · Pull Request #19619 · PX4/PX4-Autopilot · GitHub
RC
- drivers/rc_input: ensure RC inversion is disabled initially by dagar · Pull Request #19571 · PX4/PX4-Autopilot · GitHub
- Support on Generic button/switch triggers by RC Controller by junwoo091400 · Pull Request #19638 · PX4/PX4-Autopilot · GitHub
- Supporting generic button / switch trigger actions (flight mode change / landing gear / etc)
- TODO : Daniel will give comment on more generic support on the buttons (e.g. Safety Button)
- Supporting generic button / switch trigger actions (flight mode change / landing gear / etc)
Other
- Refactor tune control & support broken single note playing functionality by junwoo091400 · Pull Request #19654 · PX4/PX4-Autopilot · GitHub
- Fixed broken tune control implementation
- Feedback : Should discuss whether it’s worth it to keep the
tune_controlmodule in PX4 at all. Is it useful?
- Feedback : Should discuss whether it’s worth it to keep the
- Fixed broken tune control implementation
Issues
 Slack
Slack
- Canceling a Mission in Flight - Ryan
- A user on discuss wants the ability to take his quad out of mission mode from his RC
Remote then when goes back into mission have the mission start over. I never really thought about it but this is actually a parameter that should be added so when you switch out of mission, waypoint count is reset then back to mission mode and it starts over.
From Discuss but actually an interesting idea for a parameter.
Cancelling a Mission in Flight - #8 by ryanjAA
- A user on discuss wants the ability to take his quad out of mission mode from his RC
 Last Dev-Call
Last Dev-Call
- ManaualControl module message alerts for having RC & Joystick commands coming in? - Daniel
High priority queue
Discussion based on : https://github.com/orgs/PX4/projects/24
 Release
Release
- Waiting for NuttX Priority issue before cutting the Beta for v1.13.0