May 04, 2022
Join us
Agenda
- Community Announcement
- Community Q&A
- Project Updates
- General Discussions
- Weekly Overview
- High priority queue
- Release
 Community Announcement
Community Announcement
 Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions)
Q.1 : RP2040 Crash problem - Vatsal
- going to hard fault in the CROMFS.
- Answer
- Check the parameters going into the function, whether they are NullPtr
Q.2 : MAVROS extras image publication to receive images? - Safy
- Making sure you're not a bot!
- Want to send over images with MAVLink, to not have multiple radios for different usages
- Answer
- Probably not built for high bandwidth usage (since it’s MAVLink)
- Better to use MAVROS to figure out RTSP stream
- image_pub: Complete image decoding & publish. · mavlink/mavros@c45b2d6 · GitHub
Q.3 : About GCS sending the flight plan - Jason
- In UGV the flight plan is not usefull. You need to find a sidewalk and need the waypoints as general ideas.
- Autonomous sailboat UGV usage case. With a Jetson board locally.
Where in the code could I review where the waypoint and the local planner is running in a some sort of loop?
- Let’s say we plan a mission from point A to point B
- MAVLink vs ROS Bridge
Q.4 : Checking the version - Jason
Where do I see the version of the FMUK66?
- Answer : Type
ver allin the MAVLink Console in QGC / Terminal.
 Project Updates
Project Updates
P.1 : STM32H7 SocketCAN driver in NuttX done - JC
https://github.com/apache/incubator-nuttx/pull/6057
- Plan to finish testing this week and get merged next week.
- Backported to PX4 and working with UAVCAN v1 here: GitHub - PX4/PX4-Autopilot at dev/socketcan-nuttx-10.3.0 · GitHub
- Getting 4 Mbps in the test now
- Current NuttX is quite broken, so it’s curently the PR is based on NuttX 10.3
 General Discussions
General Discussions
D.1 : Safe local coordinate manipulation by @tstastny
- Found a corner case
If we take in local coordinate and add offset? The EKF won’t take this into account, unless global coordinate is also updated!
- There can be 2 solutions
- Vector3f?
- Make it clear in the module that any coordinate stored in local frame can have offset from the EKF
- Answer
- How about taking into consideration the ‘type’ of coordinate?
- Can we have concept of time discontinuity and have a serial number that indicates that the reset has occurred?
- On Multirotor there are a lot of reset handling. Ideally we could save both local & global coordinate.
- TODO
- Check the TF in the ROS to make sure we aren’t re-inventing the wheel

- Check the TF in the ROS to make sure we aren’t re-inventing the wheel
- What’s the motivation?
- Local coordinates are easier to deal with for control / navigation, etc.
D.2 : Dubins Aircraft MAVLink Message by @tstastny
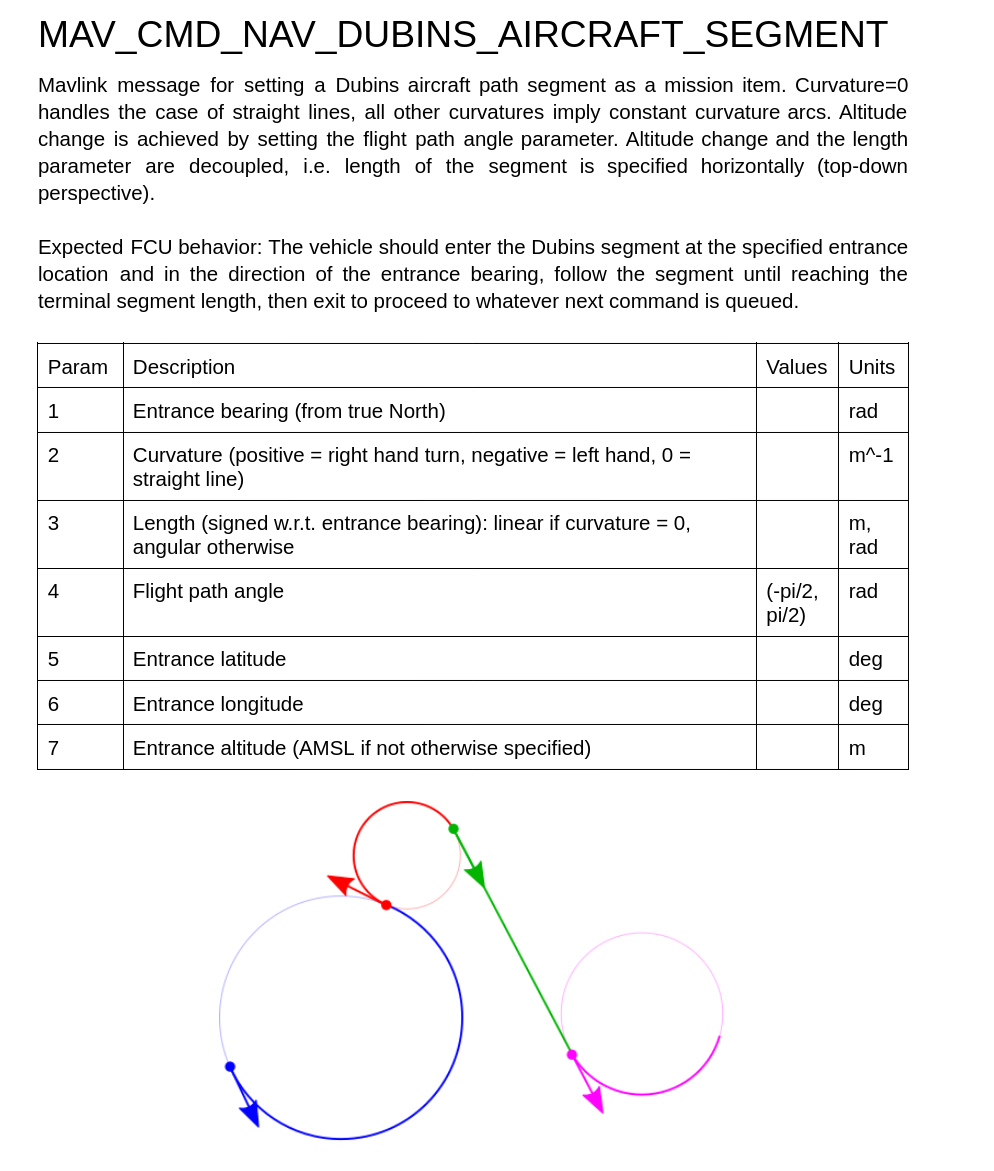
- Implements a long-existing concept in aerospace industry
Feedbacks and Comments will be appreciated!! (In the doc)
- Q. What would the GCS side be like?
- It’s good to expose what the vehicle is going to do to the users - Chris
- E.g. CAM software showing the full tool path for milling something
D.2.1 : What happens when there’s a stall during high acceleration turn of a Fixed wing in PX4? - Chris
- Probably will boost throttle to regain airspeed
- There actually was a logic for this specific case
D.3 : L1 depreciation by @tstastny
- would like to discuss what steps are necessary to deprecate l1 control in favor of NPFG, as it is causing more hacky headaches to keep l1 now, where NPFG is an almost identical controller, but just with extra (disablable) features.
 Weekly Overview
Weekly Overview
 Github
Github
Pull Requests
- dynamic control allocation: helicopter support by bkueng · Pull Request #19559 · PX4/PX4-Autopilot · GitHub
- drivers/rc_input: RC_INPUT_PROTO parameter minimal implementation by dagar · Pull Request #19539 · PX4/PX4-Autopilot · GitHub
Hardware
- Adding px4 fmu v6c by davids5 · Pull Request #19544 · PX4/PX4-Autopilot · GitHub
- px4_fmu-v6x_bootloader:Ensure PWM pins are low from boot by davids5 · Pull Request #19535 · PX4/PX4-Autopilot · GitHub
- px4_fmu-v6x:Add Rev 4 Sensors by davids5 · Pull Request #19536 · PX4/PX4-Autopilot · GitHub
- Added PX4 VxX Mini baseboard by davids5 · Pull Request #19549 · PX4/PX4-Autopilot · GitHub
- Changes to pr-extendend_hw_ver_rev_format by davids5 · Pull Request #19575 · PX4/PX4-Autopilot · GitHub
- NuttX with test code for stm32:Discard data with Parity Errors by davids5 · Pull Request #19446 · PX4/PX4-Autopilot · GitHub
Issues
Control
 Slack
Slack
 Last Dev-Call
Last Dev-Call
 High priority queue
High priority queue
Discussion based on : https://github.com/orgs/PX4/projects/24