rroche
1
June 29, 2022
Join us
Agenda
- Community Announcement
- Community Q&A
- Project Updates
- General Discussions
- Weekly Overview
- High priority queue
- Release
 Community Announcement
Community Announcement
PX4 master branch naming → ‘main’ 
- In case you want to learn more: visit Github’s Post on it

 Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions)
 Guideline for asking a Question
Guideline for asking a Question
- Specify what you are trying to achieve
- Specify what environment / platform you are using
- Prepare a Link or Document to help understand if possible
- First, ask the question on the Slack or create a Github Issue!
- If you take over 5 minutes for the question, please continue in Slack or a Github Issue.
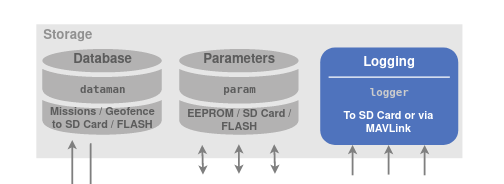
Q.1 : Where are parameters saved in Flight controller (physically)? - Vatsal
- Problem now : Not sure if saving parameter in Flash is possible.
- Answer : In STM32, there’s flash backend.
- Also can utilize MTD / NuttX to store the parameters
- Usually in FRAM, after v1.12, it would also save into a SD card
Q.2 : Is Px4 using ROS? - Kevin
- MAVROS exists as a bridge between Px4 and ROS
- MAVLink is used for telemetry & controlling PX4 vehicle
- MAVROS is bridging that MAVLink connection as a ‘ROS Node’
- There exists uORB messaging system that acts like ROS system!
Check out the tutorial blog post on uORB → PX4 uORB Explained: Part 1 - PX4 Autopilot
 Project Updates
Project Updates
P.1 : PWM Disarmed value PR
- First, Mixer done on IO side kinda worked
- Next, mixer being done in FMU now
- Need to review exceptions like Parachute, in terms of configurable failsafe value
P.2 : Generic Button/Switch support support for old QGC
P.3 : Board information metadata JSON file PR
- Switch from Jenkins to Github Actions
- https://github.com/PX4/PX4-Autopilot/blob/main/.ci/Jenkinsfile-compile
- There are some issues on QGC Windows with Orange? board / etc.
- TODO : Try out any NON-PX4 boards: Cube, etc. Weird Driver issue

- Matthias using KAKUH7 with no issues on Windows
- Let’s give a test with the QGC build on Mac/Linux/Windows platform and make sure the JSON fetching part works!
General Discussions
D.1 : manual_control_setpoint message roll/pitch/yaw … x/y/z naming
Discussion is here
- Proposing renaming the fields as roll/pitch/yaw/throttle
- What about Rovers?
- We don’t have unified control mode for Rovers (some people use Yaw, some Roll, etc)
- What about Throttle range?
D.2 : Getting Follow Me into V1.13
PR is up, just needs a quick review
D.3 : Coding Format 
 Weekly Overview
Weekly Overview
 Github
Github
Recently updated Issues / PRs in PX4-Autopilot Link
Pull Requests
*
Issues
*
 Slack
Slack
 Last Dev-Call
Last Dev-Call
PX4 Dev Call: April 27, 2022
High priority queue
Discussion based on: https://github.com/orgs/PX4/projects/24
 Release
Release