July 20, 2022
Join us
Agenda
- Community Announcement
- Community Q&A
- Project Updates
- General Discussions
- Weekly Overview
- High priority queue
- Release
 Community Announcement
Community Announcement
PX4 Dev Summit video
Will be premiered one at a time ![]() ! First video will be the Keynote
! First video will be the Keynote

 Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions)
 Guideline for asking a Question
Guideline for asking a Question
- Specify what you are trying to achieve
- Specify what environment / platform you are using
- Prepare a Link or Document to help understand if possible
- First, ask the question on the Slack or create a Github Issue!
- If you take over 5 minutes for the question, please continue in Slack or a Github Issue.
Q.1 : Testing lightware LiDaR - Andrew B
Need helping testing lightware LiDAR with collision prevention, need power module (I already have one) and flight controller with at least 2 telem ports (my second one can’t transmit out). Daniel is helping
Q.2 : Custom Multicopter control using dynamic control allocation - Salvatore
My question is about the control allocation for custom drones. In my research lab we have different types of multirotor, for example i’m working on a tilting rotor coaxial octocopter and i need to allocate both the speed of the propeller and the angles of the servomotors.
This is something that is not already present in the firmware (if i’m not wrong).
Is there a guide (or will be) on how to write a control allocator/effectivness matrix? All of our drones works with px4 but we have this little-big limitation
Right now working in X-shaped, Tilt-rotor coaxial quadrotor
Response from Mathieu on Slack:
You can simply take as example one of the existing ones (Pseudo-Inverse, sequential desaturation) and add your own algorithm here:
https://github.com/PX4/PX4-Autopilot/tree/main/src/modules/control_allocator/ControlAllocation
And then add it here:
Dagar: Get it to a level that’s functional (Simulation / ), and ping him on slack
 Project Updates
Project Updates
P.1 : Replace fixedwing ECL rate controller with RateControl Library #19912 - Jay
- Discussion on Airspeed’s effect on the control
- Silvan : What is preventing us from having a unified rate controller (for Fixed Wing, Multirotor, etc)? : Airspeed
- Now the rate controller doesn’t do the turn coordination
- Currently Multicopter Rate Controller has a hacky I-term modification
- Would be better to have a unified rate controller that can abstract-ify the vehicle type.
- Current VTOL using both Fixed-Wing & Multicopter rate controller created hard-switching between the controllers, so having a unified controller would be great.
Flight Testings - Farhang
Tests are coming this week. Got stuck on QGC GPS disabled, after finding out the issue I will continue and share. Just an update
P.2 : PX4 Failsafe overhaul RFC from Kaylan
https://github.com/Dronecode/rfcs/pull/1
- Please review if you have time!

- Also, Kalyan is interested in doing a broad pass no DroneCAN in PX4, so if you have thoughts / ideas, contact him!
 General Discussions
General Discussions
D.1 : Bringing back the pwm test functionality
There was a Slack Thread on PX4 now missing the ability to do pwm test commands to send raw signals (e.g. 2000 us PWM value to a motor) via CLI.
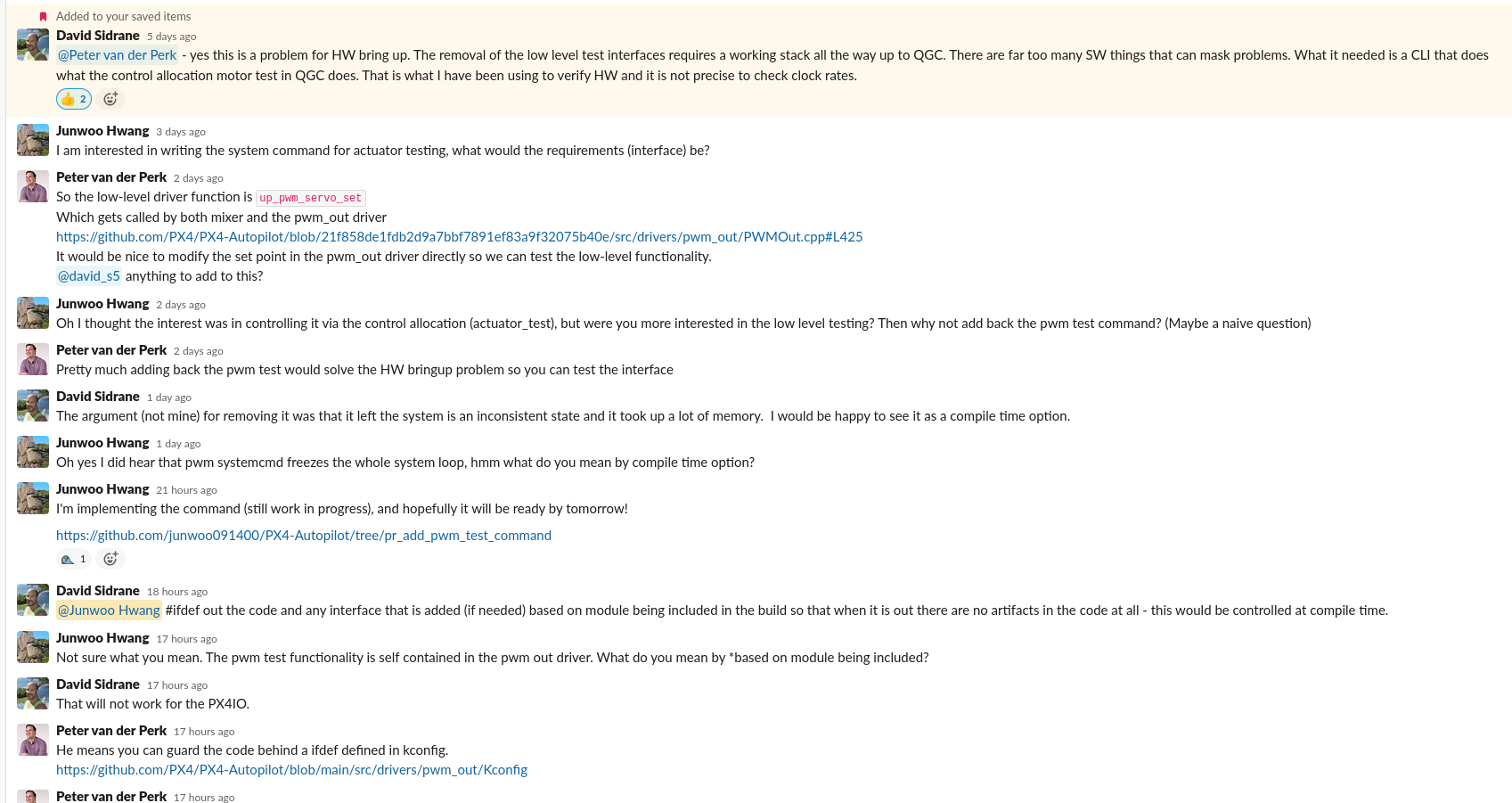
There is an actuator_test command, but this only works if the user has mapped the functions to the outputs (e.g. Motor1, Servo1, etc), which is commonly not the case for low level hardware developers who wants to quickly test out the PWM output without setting all of these high level concepts.
Ideas
- Do the #ifdef to only include the pwm test when doing hardware tests
- Create a ‘timer test’
There’s a branch that aims to implement the pwm_test functionality back
D.2 : Discuss Forum not being active and Slack’s history getting deleted problem
Currently the discuss forum is quite inactive and a lot of users don’t get feedback. Whereas Slack is more active but we are on a free plan so the history is only preserved up to 10,000 recent messages (which is around 1~2 month for the size of PX4 Slack community.
Using Discuss Forum, we have the whole knowledge preserved, but since it isn’t as convenient as the Slack, not a lot of users get fast feedback.
And Slack is great for having fast feedbacks but all the conversation gets deleted after 1~2 months, which is terrible in terms of preserving the knowledge & benefits of future users.
Migration plan of the messaging platform is probably not ideal, since it’s worse than Slack.
Solution:
- Create a Slack Bot that can nudge people to move discussion to Discuss Forum when the thread gets long
- Have a Bot that can migrate the thread of conversations automatically to Discuss Forum when the user manually presses the button.
D.3 : Reducing flash usage - David
The 6X PR is having flash overflowing
https://github.com/PX4/PX4-Autopilot/pull/19819
- Reducing the number of airframes as we now have the control allocation framework
- Right now in VTOL, Flaperons aren’t working without the specific airframe definition (/mixer)
- Currently a lot of the airframes aren’t very helpful (very custom configurations)
 Weekly Overview
Weekly Overview
 Github
Github
Pull Requests
 Slack
Slack
 Last Dev-Call
Last Dev-Call
High priority queue
Discussion based on: https://github.com/orgs/PX4/projects/24