June 14, 2023
Join us
Agenda
- Community Announcement
- Community Q&A
- General Discussions
 Community Announcement
Community Announcement
A.1 :
 Community Q&A (No deep technical discussions)
Community Q&A (No deep technical discussions)
 Guideline for asking a Question
Guideline for asking a Question
- Specify what you are trying to achieve
- Specify what environment / platform you are using
- Prepare a Link or Document to help understand if possible
- First, ask the question on Discord or create a Github Issue!
- If you take over 5 minutes for the question, please continue in Discord or a Github Issue.
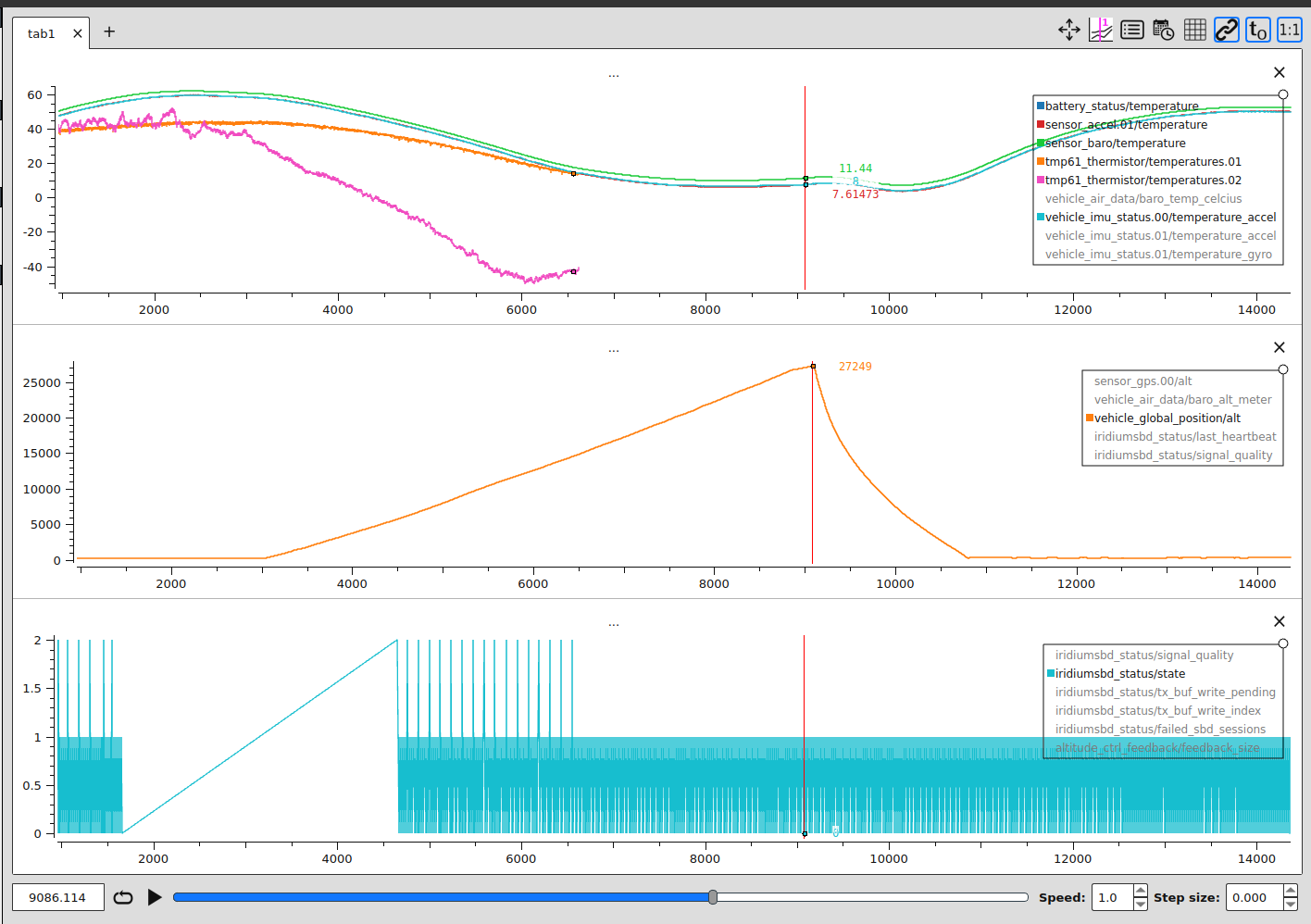
Q.1 : Iridium driver malfunctioning - Ludovic
- Long duration High altitude balloon test
- Iridium driver state is switching to idle, hangs, and works, then hangs, and then doesn’t continue functioning.
- Flight log is 800+ MB, so couldn’t upload to flight review
- Also, thermistor topics were logged
iridiumsbd_status message stopped, then continued working.
Question: Was the modem actually working?
Is it actually communicating with the modem during the period it ‘hangs’?
Action Item:
- Figure out the structure of the module handling the iridium module communication & test via hardware on what happens when modem disconnects, etc.
- Check if there are extra metrics in the modem that can be analyzed in PX4 side, to debug this
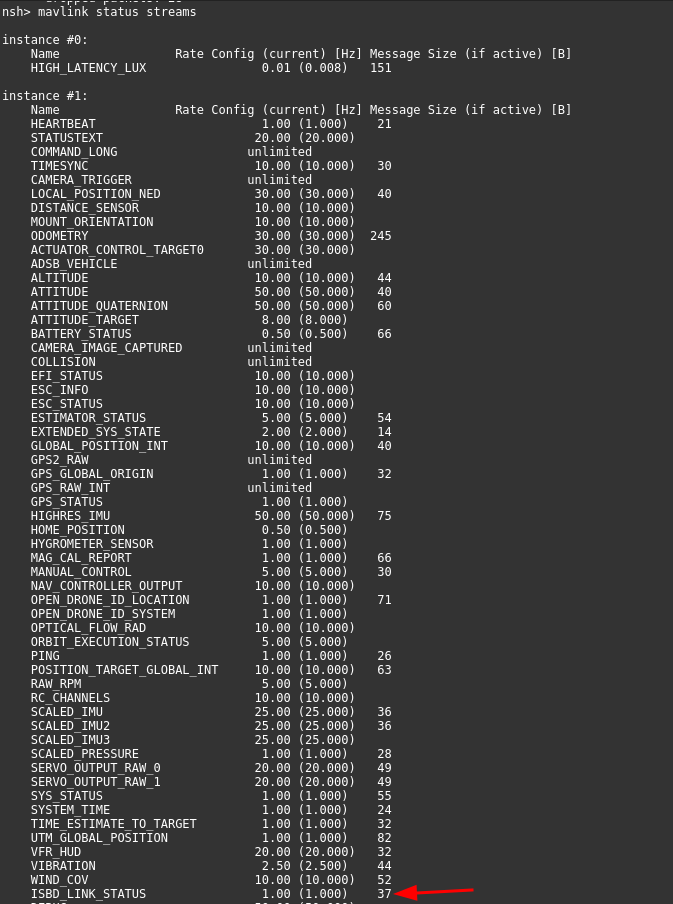
Q.2: MAVLink stream of a custom message not working - Ludovic
Currently trying to do check Iridium SBD message via MAVLink stream, as checking the status after downloading uLog is too time consuming.
Discussion:
- Could try Wireshark for checking if data is coming through at least.
The message: MAVLINK Common Message Set (common.xml) | MAVLink Guide
QGC MAVLink generation part: qgroundcontrol/src/AnalyzeView/MAVLinkInspectorController.cc at aa0f2c61b2c0dbf1913f1f8186312811ca7dbdeb · mavlink/qgroundcontrol · GitHub
Q.3: Precision landing not working - Ivan
- There are parameters to configure to use precision landing.
- For some reason, landing target estimator parameter isn’t showing up.
If the precision landing is not working with the drone check for this:
- Open QGC
- Click on QGC icon on the top right corner
- Select Vehicle Setup
- Click on Parameters tab from the left column
- on the search bar look for SENS_EN_IRLOCK and for LTEST
- If none of those shows then it is possible that Landing Target Estimator is not running.
To fix this we will do:
- Open QGC
- Click on QGC icon on the top left corner
- Click on Analyze Tools
- Click on MAVLink Console
- Create a folder
mkdir /fs/microsd/etc
- Create a extras.txt file on the new folder
echo irlock start -X >> /fs/microsd/etc/extras.txt
echo landing_target_estimator star >> /fs/microsd/etc/extras.txt
There’s a workaround solution here for example: irlock doesn't work with the irlock Pixy camera · Issue #10210 · PX4/PX4-Autopilot · GitHub
Feedback: Make sure to also check especially the first pr of these:
- Check this one specifically and potentially test it out (not sure if it’s up to date now) https://github.com/PX4/PX4-Autopilot/pull/18973
- Add separate precision landing library. by KonradRudin · Pull Request #20645 · PX4/PX4-Autopilot · GitHub
For now, irlock & precision landing wasn’t being actively maintained, so it may be broken as well. Also, e.g. landing target estimator probably should be broken out for different sensors (e.g. UWB, Ir lock, etc) - Daniel
Action Item:
- Ivan will submit the issue to the PX4 repository
This check should access the parameter, hence the parameter should get flaged active and advertised to the ground station:
Q.4: ROS2 multi vehicle simulation - Aly
Using PX4 Guide (main), the namespaces aren’t configured correctly (separated out).
How environment variables work/ where to find that info?
Link to discord questions: Discord,
Discord
More details: The note in the documentation highlights the issue that the first instance (px4_instance=0) does not have an additional namespace in order to be consistent with the default behavior of the xrce-dds client on a real vehicle. I am using sitl_multiple_run.sh and the issue is sitll present
Question: Where’s the list of topics communicated through DDS?
- Currently it’s a static YAML file under the dds module.
Also, when using multi-vehicle simulation, the DDS topics list are getting redirected (Standard IO), compared to when doing single vehicle simulation.
Note, getting the PX4 node wrapped properly and removing the multi vehicle script with arbitrary indexing conventions, etc would resolve our pain point long term as well - Daniel
Action Item:
- Have an issue tracking this by Aly
- Create CI workflow to make sure we support this multi-vehicle via DDS supported
Q.5: ROS2 Humble and Docker support
Answer: We aim to have them in a single container & switch over to Long term support ROS2 version as well.
This was also discussed here: PX4 Maintainers Call: June 13, 2023