Hi, I have another question. I’m trying to plot a new MAVLink message inside QGC with the MAVLink Inspector view, but I’m not able to see it on the QGC side.
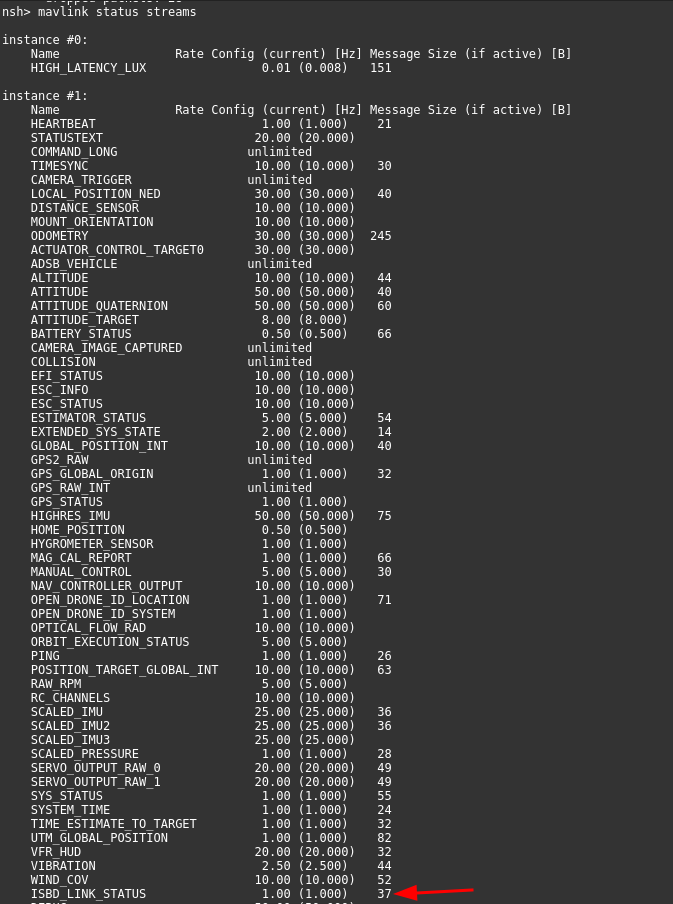
I have a new MAVLink stream being output on the USB connection on the Pixhawk hardware. And I’ve tested it with another interface to make sure that it is actually publishing data. And I can also see it when I execute the mavlink status streams command:
And I’m sure I need to update the C library that QGC is using so that it will have the proper header to decode the msg. So I executed the python3 -m mavgenerate and generate the header with version 2 in C to the root of the c_library_v2 folder.
Also, my new message is inside common.xml.
Then I simply compile QGC with the docker instruction docker run --rm -v ${PWD}:/project/source -v ${PWD}/build:/project/build qgc-linux-docker. But then when I look into the MAVLink inspector, I’m not seeing anything regarding my streams ![]() .
.
There’s this issue that mention it, but there doesn’t seem to have clear answer for me: New MAVLink message implementation to QGroundControl · Issue #2731 · mavlink/qgroundcontrol · GitHub
Any help would be appreciated ![]() !
!
Thank you again, and sorry if I’m asking too many questions ![]() .
.
Ludovic