Hi all,
I am trying to add the topic VehicleGpsPosition to the px4_ros_com package. I’ve already modified the file urtps_bridge_topics.yaml in the PX4-Autopilot/msg/tools folder. And when I try to run the uorb_to_ros_urtps_topics.py to mirror the topics into px4_ros_com, I get this error:
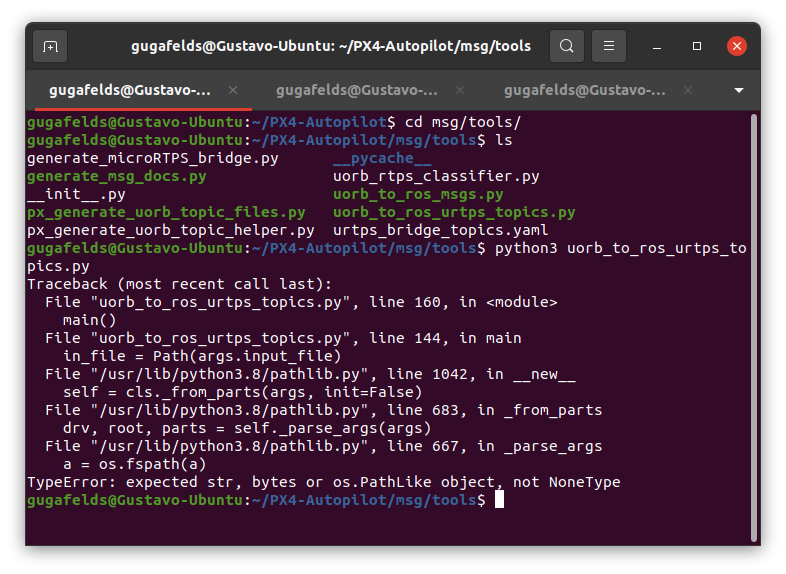
Do you know what might be happening?
Thanks in advance