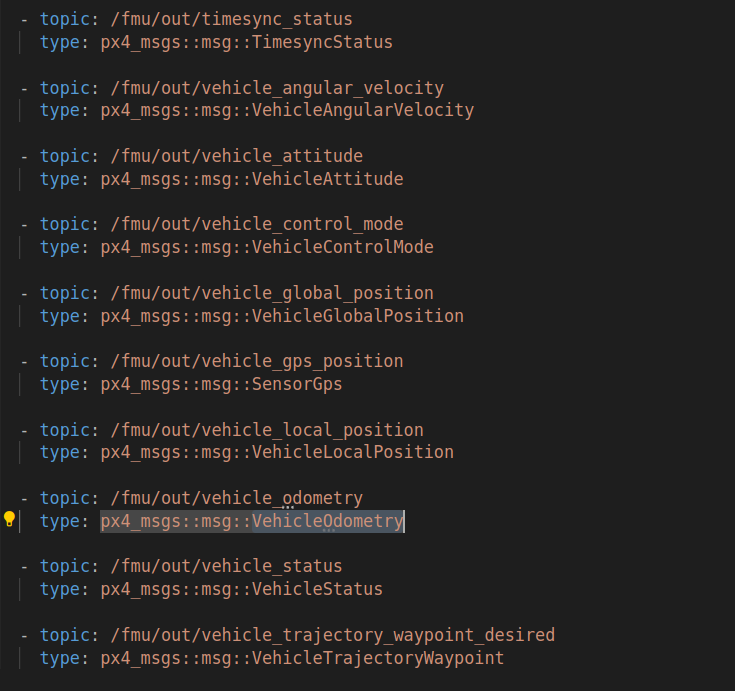
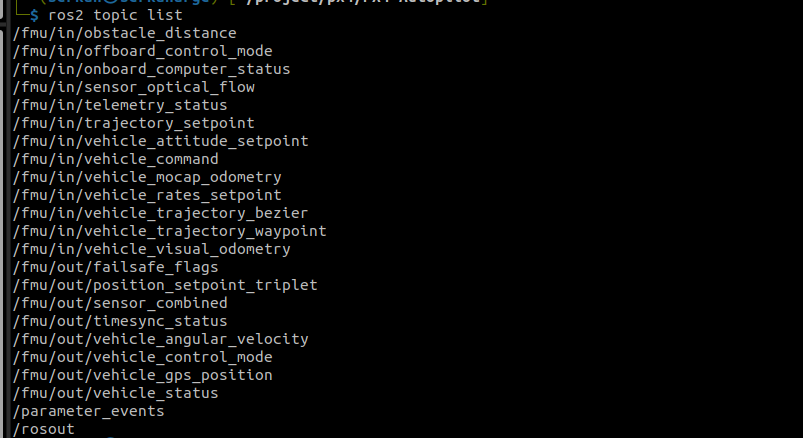
I want to use PX4 offboard mode. For this, I wrote the codes using ROS2 C++. I need the location of the vehicle for my codes. Although VehicleGlobalPosition, VehicleLocalPosition and VehicleOdometry topics are open in the dds_topics.yaml file, they do not appear in the ros2 topic list
MicroXRCEAgent udp4 -p 8888

When I proceed using micro_ros_agent, micro_ros_agent gives an error. (this page)
ros2 run micro_ros_agent micro_ros_agent udp4 --port 8888
[1726209212.561731] info | UDPv4AgentLinux.cpp | init | running... | port: 8888
[1726209212.562137] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 4
[1726209213.605104] info | Root.cpp | create_client | create | client_key: 0x00000001, session_id: 0x81
[1726209213.605176] info | SessionManager.hpp | establish_session | session established | client_key: 0x00000001, address: 127.0.0.1:13706
terminate called after throwing an instance of 'std::bad_array_new_length'
what(): std::bad_array_new_length
[ros2run]: Aborted
- OS: Ubuntu 22.04
- ROS: ROS2 Humble
- PX4: 1.14