Oh sorry, I misunderstood you then. I thought you had no RC.
Have you tested what sort of signals are sent (or rather received) when there is a signal loss? It’s important to do that on the bench to know whether a signal loss is correctly detected. What you don’t want is that the receiver sends some sort of failsafe values that you dont expect while PX4 does not know it’s in RC failsafe.
Also see: Safety Configuration (Failsafes) | PX4 User Guide
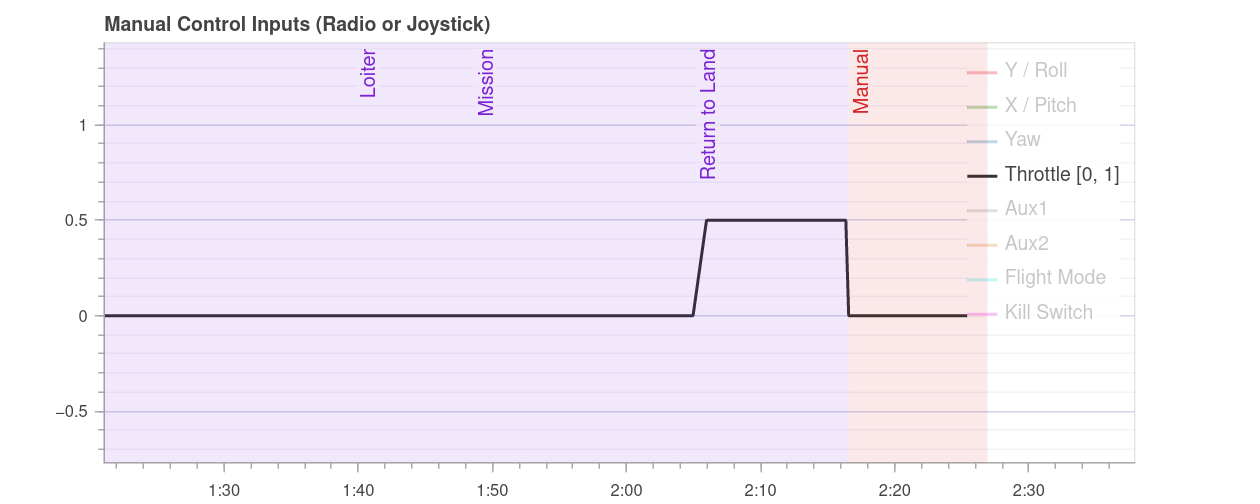
I had a quick look in PlotJuggler:
Something is not right.
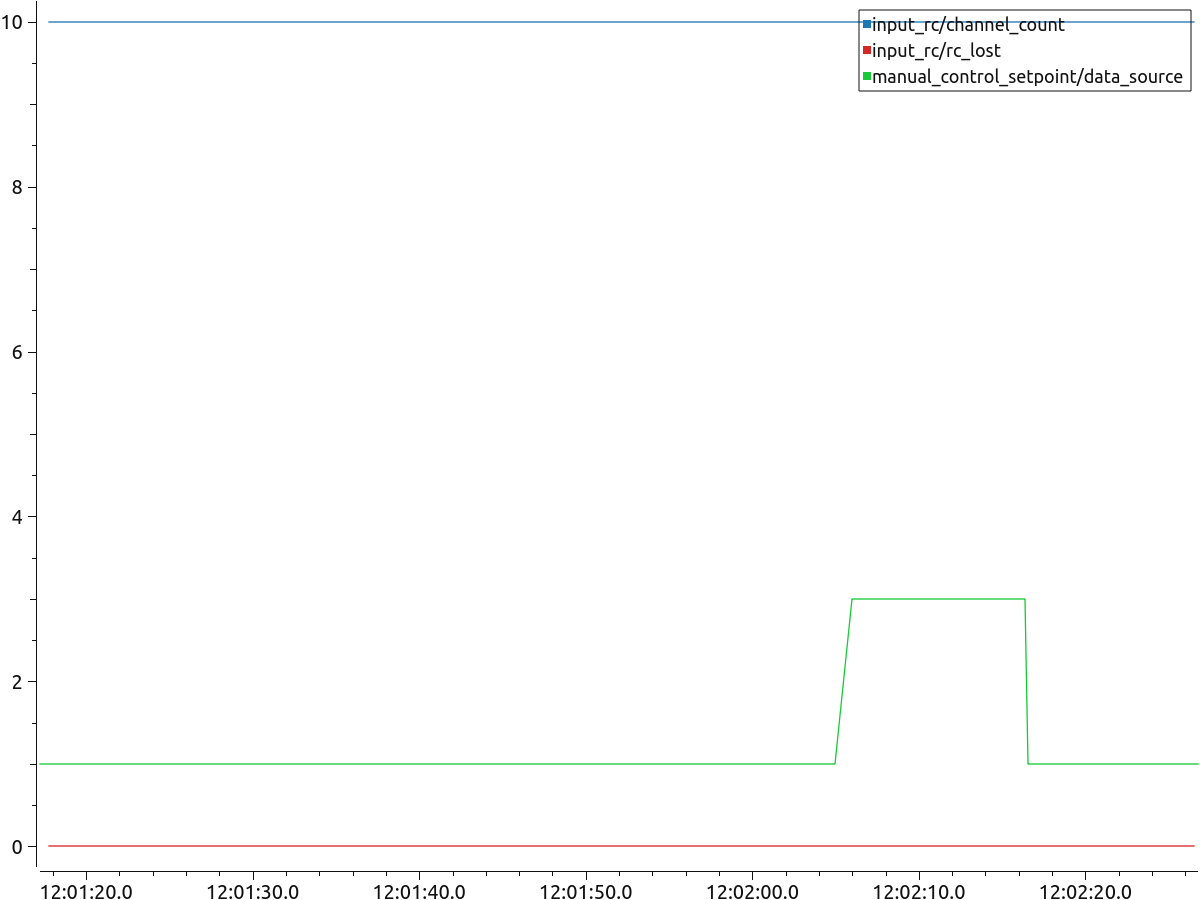
RC input is actually always “not lost”, so presumably ok, and the manual_control_setpoint.data_source is 1 which is RC (see PX4-Autopilot/ManualControlSetpoint.msg at main · PX4/PX4-Autopilot · GitHub).
However, it suddenly switches to 3 which is MAVLink instance 1. This means that some MAVLink instance is sending manual control input.
Could it be that you had a joystick or gamepad configured and connected to the computer? It seems to be switching to that for a bit, and then back to RC.
Once it switches back to RC input, it detects that the sticks have been moved, as it says “Pilot took over position control using sticks”.
Strangely not all events show up in logs.px4.io but they do in PlotJuggler, not sure why. (@bkueng could you check why some events don’t show up in Flight Review?)
The two things that seem odd to me are:
- Why did it register this as “pilot took over control”? It shouldn’t do so because the RC controls have not moved as such.
- Why did it switch to manual mode? It should go to position or altitude first, as that’s safer (and doesn’t drop from the sky with throttle at 0).
One more thing: you have changed the COM_RC_IN_MODE param, I believe. This param controls how it switches between RC and MAVLink input.
If you use option: RC only, MAVLink only, or keep first, you are much safer against these sorts of problems because it won’t switch mid flight.