For point # 2 . something wrong with my eyes for a moment in time…
Point # 3 Direct Mavlink , from my experience , created a stuck receiver even while this was tested in SITL mode. I don’t know the reason behind this. That was back with Px4 v1.12 . Sometimes works and sometimes it doesn’t work . But here since OP confirms using Mavros , there is no confusion . Point # 4 Px4 v1.14 version experience came from my transition from previous versions resulting in crashes even during lift off and damage to my quadcopter. The experience probably will be different for other fc models.
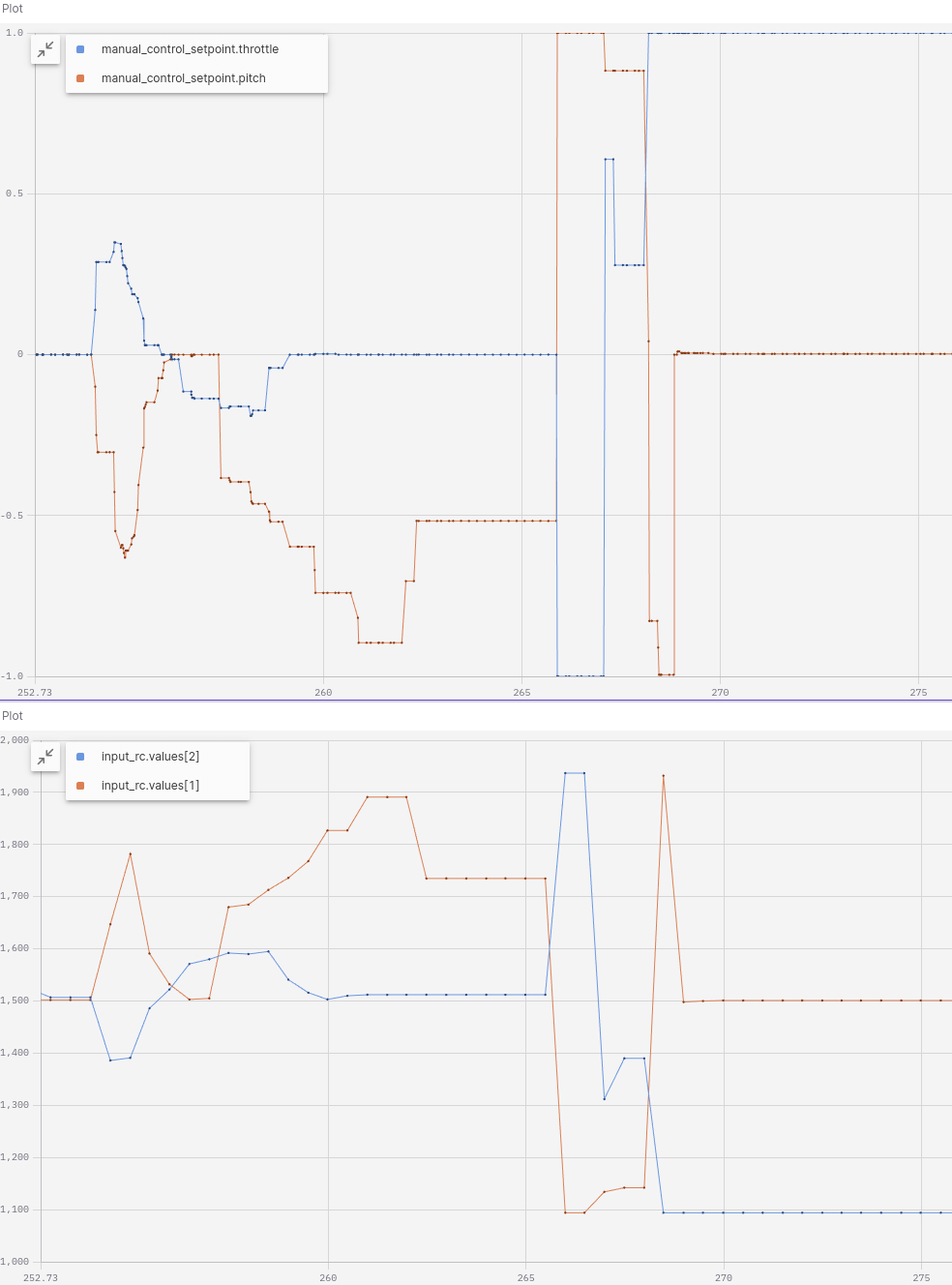
@JulianOes Here comes the funky part. The throttle and pitch in input_rc and manual_control_setpoint are inverted for some reason. When flying the drone, the stick input yields the expected behavior (no inversion). I also recalibrated the RC in QGC which did not solve this issue.
With that being said, the stick input of the throttle was set to high (full throttle). Since PX4 Flight Review uses the manual_control_setpoint topic for its plots, you can see the throttle being -1. Below you can see a plot showing the inverse behavior.
Top image shows manual_control_setpoint topic with throttle (blue) and pitch (orange). Bottom image shows input_rc topic with throttle (blue) and pitch (orange)
@datsc
Oh, if this is on Herelink, that is interesting. Let me check with the CubePilot folks and get back to you!
@sibujacob
2.
3. Are you maybe referring to direct actuator control which is messing with lockstep in SITL?
4. Fair enough, in general I’d agree but here I don’t think upgrading to v1.15 would change anything.
@JulianOes Actually I’m not using CubePilot, just a Pixhawk 6C Mini with a Voxl 2 companion computer. Also, nevermind the inversion, I fixed that now by reconfiguring the RC