Yesterday and today I did some tests on my large drone. ( Octa copter coax, 100kg, diagonal distance between motors almost 2,5m).
Conditions: no parameter change between flights yesterday and today.
Problem: Yesterday i had very nice flights. Mode is position and on takeoff the vehicle goes straight up with a little bit of yaw rotation. Here are logs:
Today, vehicle can’t separate from ground without starting to bank even when still on the ground. Almost had a prop strike. So on take off it is not going vertically up but to the side. Here are logs from today!
What a gorgeous project, thanks for sharing with us.
From my point of view, your propulsion system is too weak in comparisson with the weight of the drone.
You are taking off with a throttle of 70-80%, which ideally should be around 60%.
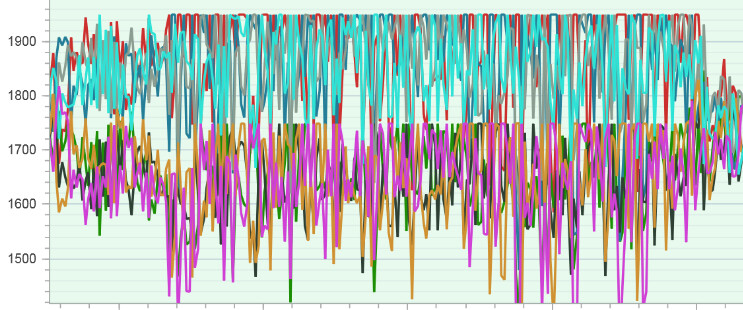
Many times along the flight the motors are receiving the PWM_MAX value, 1950. This means no extra power to correct the attitude if needed.
Also could happen that a motor burns out in the air.
In my opinion, if you want to fix it without espending money in the parts, try to balance the drone as perfect as posible. In addition, revise that all the blades are pointed with the same agle upwards. I would correct the PIDs too, but the first thing I think that si correct the propulsion.
The MC_PITCHRATE_MAX, MC_ROLLRATE_MAX and MPC_TILTMAX_AIR are very conservative, unless you have a perfectly balanced drone.
I will descend the MPC_TKO_RAMP_T to 2.
Like you say, there is a magnetic field problem. Take in mind that could be not only affecting the compass, and also the gyro and accel.
My advice is to solve the problems and start flying in stabilized mode. At least you can take off in stabilized and switch to position in the air.
First of all thanks a lot for your reply! If you could please help me with few more questions.
In regard to the vehicle being underpowered: I am using a motor and prop combination which provides 30kg of thrust. The vehicle mass is 105 kg meaning that I should have 135 kg of additional thrust available for maneuvering (8 motors x 30kg). Even if it was just 25kg, that would leave me with almost 95 kg extra. (105-200). I understand that the log shows it is underpowered, but the numbers don’t add up. Any idea why?
Regarding the MC_PITCHRATE_MAX, MC_ROLLRATE_MAX and MPC_TILTMAX_AIR… Should I keep them as conservative (low) as practicable or?
You mentioned to set MPC_TKO_RAMP_T to 2. Won’t this increase the takeoff speed in Mission and Position? What would be the benefit of doing so?
You are welcom, I’m just trying to learn and help at the same time.
I don’t really know what happens with the thrust, but maybe could be that a part of is wasted correcting the yaw. I’m sorry but I’m not used with octocopters.
I will set pitchrate max,…roll rate max,…at least at 35 degrees.
About the MPC_TKO_RAMP_T, this parameter is like acceleration speed until you arrive to MPC_TKO_SPEED.
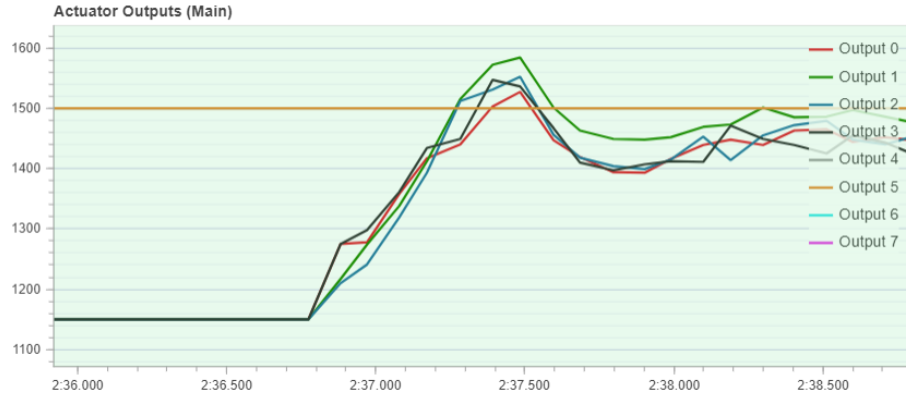
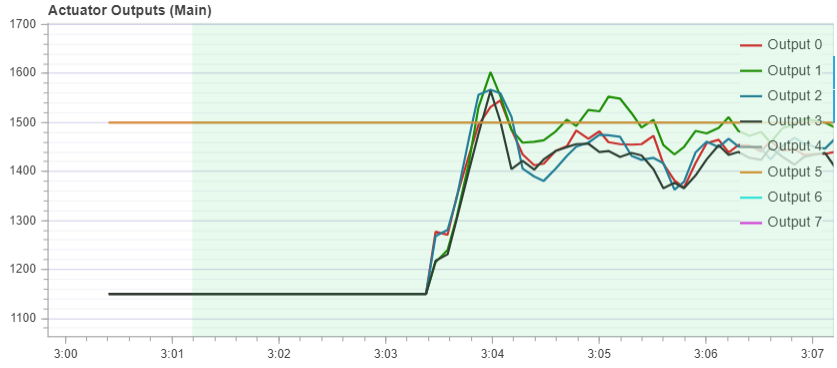
As an example, here you have and example with MPC_TKO_RAMP_T= 1.5
If the take of acceleration is to slow (hight tko ramp value) and the drone is nos correctly balanced, it could start trying to correct its position (pitch, roll, yaw) while the landing gear is still touching slightly the ground. That could end in a disaster.
Of course hight value makes smoother take off. Try different values.
I would focus finding where the yaw comes from.
Good luck and give us feedback about your progress!