Today I tried to do a test with a large octocopter coax configuration (horizontal distance between motors is a bit more than 2 meters).
I have performed a takeoff in automatic and stabilized modes and both times very rapid and high
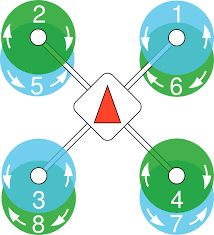
diagonal oscillations appear. Oscillation is diagonal in the axis of motors 2/5 and 4/7. Any ideas as to why this might be happening and how to solve it? I have set octocopter coax generic (not wide). Should I switch to wide?
Few days ago I was using this Pixhawk and Px4 on a bit smaller hexacopter and it worked perfectly.
See if @bresch will drop by.
My thought is that the motor configuration might not be right.
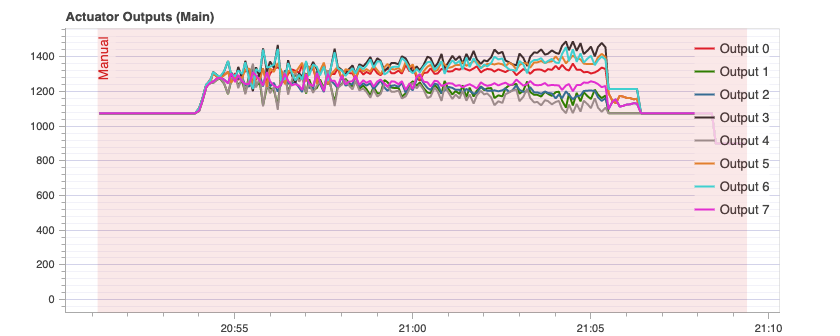
It basically cut off 4 of the motors, but that could be a side effect of something else.
For example not connected to correct outputs, turning in the wrong direction for where they are.
The FC assumes things are correct and just drives the motors, and it this case drove 4 motors off.
Also not aligned well, meaning tilted. I just takes a slight amount of tilt to cause issues.
For hovering the motor drive signals should be about equal.
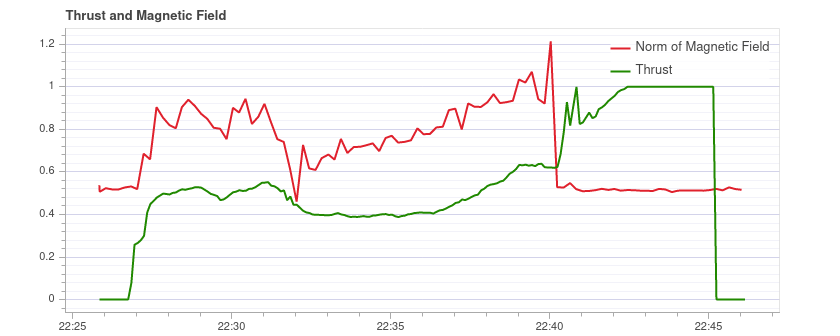
I agree with @jimdgit , something seems wrong with the motor wiring/titlting/ordering (the drone is unable to control the yaw rate). In addition to that, the magnetometer is highly affected by the current going through the wires, which makes the yaw estimate go nuts and makes the position controller diverge.
So double check the motor rotations, wiring, ordering, … and be careful and first fix the issues while being in stabilized mode because it can go really quickly wrong when the position controller diverges.
I had a similar issue where my octoquad was real loud and immediately started to rotate. In my case I had a motor rotating the wrong direction and a prop that was on the wrong arm. CW vs CCW. With 8 motors you have to check and recheck every bolt, motor, and prop before launch.Things go bad fast with a large aircraft.
Thank you for all the info. I will check again. My question with magnetometer is the following: How is it affected by current when on my hexa config it was working perfectly? It is in the exact same position (whole FC system is in a transparent plastic box). And to make it even more clear. Since I am using high voltage and amperage, my pdb is not really distributing power from main batteries. I only have ESC (red white black) wires connected to PDB, and the large ESC wires (red and black) are connected to the main batteries with a 2 special cnc machined distributor (metal part shaped in a way to allow one battery to supply 4 motors). So high current is nowhere near magnetometer. This is why I am confused.