I’ve used PX4 very successfully with a multicopter, so I decided to give a plane a try.
I have a Phantom FX-61 FPV setup with pixhawk, GPS, airspeed sensor as per recommendations I found here: https://pixhawk.org/platforms/planes/phantom_fpv_flying_wing
When testing Manual mode in the lab I can control throttle and elevons fine, when I switch to Altitude control the elevons are controlled by the autopilot as expected but the motor stops turning immediately… When I switch back to Manual the motor revs up again.
What is happening here? Is the autopilot expecting some other input from user?
I don’t have any experience flying a plane (apart from simulator) so I have googled hard to find any instructions on what the process is to use PX4 in a plane, but apart from a description of the flight modes I haven’t found any so I’m after pointers regarding the launch/takeoff a wing, what mode is recommended ( manual or altitude control) etc…
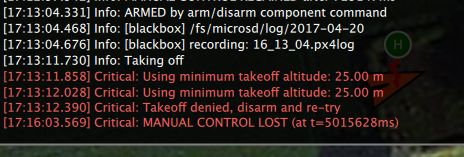
I have also found in the forum references to takeoff mode, I have tested it enabling it from QGC (can’t see how to do it from Radio) but I get an error beep and this message in QGC:
So to summarise I’m totally stuck… and would appreciate some help.
Thanks!
In altitude control mode the throttle is set to idle when it thinks you’re landed.
Generally you’d want to make sure the plane is flying well in straight manual mode, then try stabilize and tune the FW attitude controller, then altitude and tune TECS, and finally position control mode, or the fully autonomous modes.
1.- Once I’m happy with stabilised mode, would that be a sensible mode to use to hand launch ?
2.- Is the Takeoff a flight mode something I should/could be using too?
3.- BTW I see that there are modes (Land/Takeoff/Acro/etc)… that are available in the Single Channel Mode Selection window in QGC , however they are not available in Multi Channel, why is this? Does this window only show the modes that are available for my airframe?
Takeoff is a fully autonomous takeoff and then loiter above home. It could be useful for solo hand launch, but only after you’re confident everything is tuned and working well.
Try the single switch config. This is newer and what most people (including the developers) use.
I finally got round to doing a test flight with the Phantom FX-61 FPV yesterday, I tested the stabilized mode and it worked beautifully, it really makes it easy to fly, it was great fun.
I’m now thinking about using the single switch config so that I can test the takeoff and land modes, but I’m not sure how I would go about it with a Taranis radio, as it only has 3 position switches…
Is the solution to use a combination of logical switches and special functions in the radio itself as in :
I’ve never tried it, but the idea is to mix 2 switches on your receiver to get 6 slots on one channel. There’s also been talk of expanding the single switch config to span multiple switches, but no active work.
If you’re interested in auto takeoff and land you might be better off first trying it as the start and end of an auto mission. I think FW takeoff mode works alright, but land just initiates the landing procedure whenever you flip into the mode and does the same glide slope descent regardless of altitude. In mission you add an additional waypoint in front of the landing to line up a nice approach.
OK, I’ll follow the instructions on the OpenTx site, seems to make sense.
Couple of doubts though
1.- So when LAND process starts does it start gliding in whatever direction it’s pointing? Is there a mode to make it point agains the wind? I remember reading about feathering somewhere, VTOL related i think it was…
2.- What does the RETURN mode in FW do ? Try to land at the home position or loiter over it?
3.- Also, is LOITER the same as HOLD ? I think they are, but the reason I’m asking is in that in the parameter lists I see that there is parameter which is Minimum Loiter Altitude (MIS_LTRMIN_ALT)… but it doesn’t have any effect when I select HOLD in MC mode as this just holds the MC in position at whatever height it is …
The documentation of flight modes https://dev.px4.io/en/concept/flight_modes.html talks about LOITERING mode, but doesn’t mention HOLD and I think this is just an inconsistency between the parameter and doc naming which use LOITER and the flight mode naming in QGC which uses HOLD, but wanted to be sure.
Yes pretty much. That’s why it’s usually done in a mission context so that you line up the approach with a previous waypoint. We’ve talked about having it land into the wind, but often the only safe way to land is a path planned by the operator. https://github.com/PX4/Firmware/issues/2246
It depends on RTL_LAND_DELAY, but will default to LOITER over home for a FW. If we implemented the issue I mentioned above we could atleast have RTL land into the wind intending to hit the HOME point. I also have RTL landing via mission implemented (https://github.com/PX4/Firmware/issues/6315) and I’ll open a PR for it after this v1.6.0 release goes out.
Yes they’re basically the same. Loiter is a position setpoint type, and can be within a mission, or part of RTL, or a dedicated mode. HOLD is a mode that does nothing but loiter wherever you initiate it. It’s still called LOITER internally, but named differently on the user/gcs side.