So I have a Pixhawk s550.
Using a Radiolink R9DS as my receiver and an AT9s as my controller.
I went through the pre-configuration through QGroundcontrol.
GPS seems to work fine and the controller was able to set up its calibration fine.
I am using a Venom 5400 20c 11.1v 3cell battery.
I was trying to test the motors to see if they were spinning in the right orientation however throttle does not seem to start on the drone.
I add the battery, wait till the indicator blinks green. I then push my throttle down and to the right to arm the system and the indicator goes solid green. I slowly move up the throttle but the motors do not spin.
Is there something I have overlooked doing?
When I try to connect via usb and try to arm the drone I get the following errors.
Critical:Caution: Avionics power low: 4.90 volts
Critical: Arming denied! Flying with USB is not Safe.
I figured these errors were just because I was hooked up via USB though.
Any thoughts of what I can try? Or if you need more information for suggestions let me know and I can provide.
So as an update Im still stumped at where to begin trouble shooting this. I would really appreciate any direction (or any additional information I need to provide).
I did fool around more in QGroundcontrol trying to narrow down my issue, and was looking at the UAVCAN configuration. When I try to start assignment I end up getting the error ‘Vehicle did not respond to command: UAVCAN configure’.
Would UAVCAN config not respond if just one was bad? Do I have them on the board wrong?
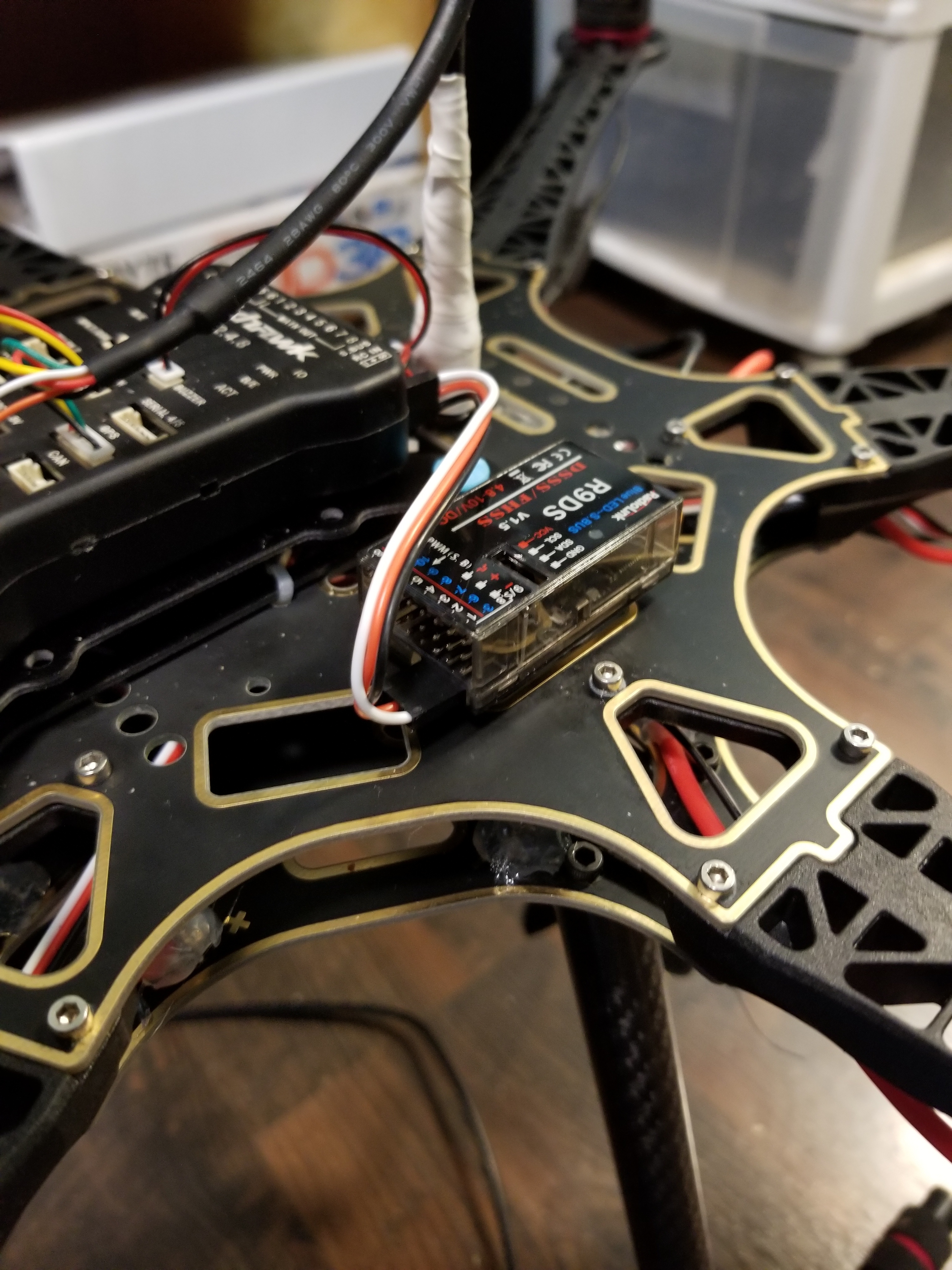
your servo rail wires are upside down. the row closest to the top is Ground or black, Middle wire is 5v positive( not needed for esc’s I remove or cut the red wire from the plug and tape it to isolate ) the white wire is your signal and should always be on the bottom row. Ask me how I know I have made same mistake more than once. so to recap the three wire cable from your esc, and your radio receiver, should be black to the top , red to the middle ( or removed if not needed for power) and white to the bottom. Good luck happy flying
Also check your receiver input ? cant tell what you have the wires plugged into on the RS9 but its not in the receiver. should be white wire to the top red to the middle black to the bottom in the far left set of pins.
Ok…Finally feels like Im making progress…thanks a lot! I did all you suggested except for removing the red middle wire)
I think I need to reconfigure/calibrate now maybe.
As soon as I arm now from ground control the motors start spinning (but it still reports the low voltage error) then says ‘return’ and the motors stop.
Ok.
So re-calibrated. I still get the low voltage warning of 4.9 volts. However the vehicle will arm. And the motors will spin and speed up and respond to radio controls.
When I measure the volts coming off power module from red to the far right end two blacks I get 5.32. However to the two black in the middle I get 4.2 and 4.07. Is this where this error is coming from? Any way to address?
The UAVCAN configuration still doesnt respond (Im not using PPM). When I try to start assignment I end up getting the error ‘Vehicle did not respond to command: UAVCAN configure’…If I verify that they are all spinning in the right clockwise/counter clockwise configuration do you think its still safe to attempt a small test flight?