I spend a long time trying to figure out why my drone is not flying.
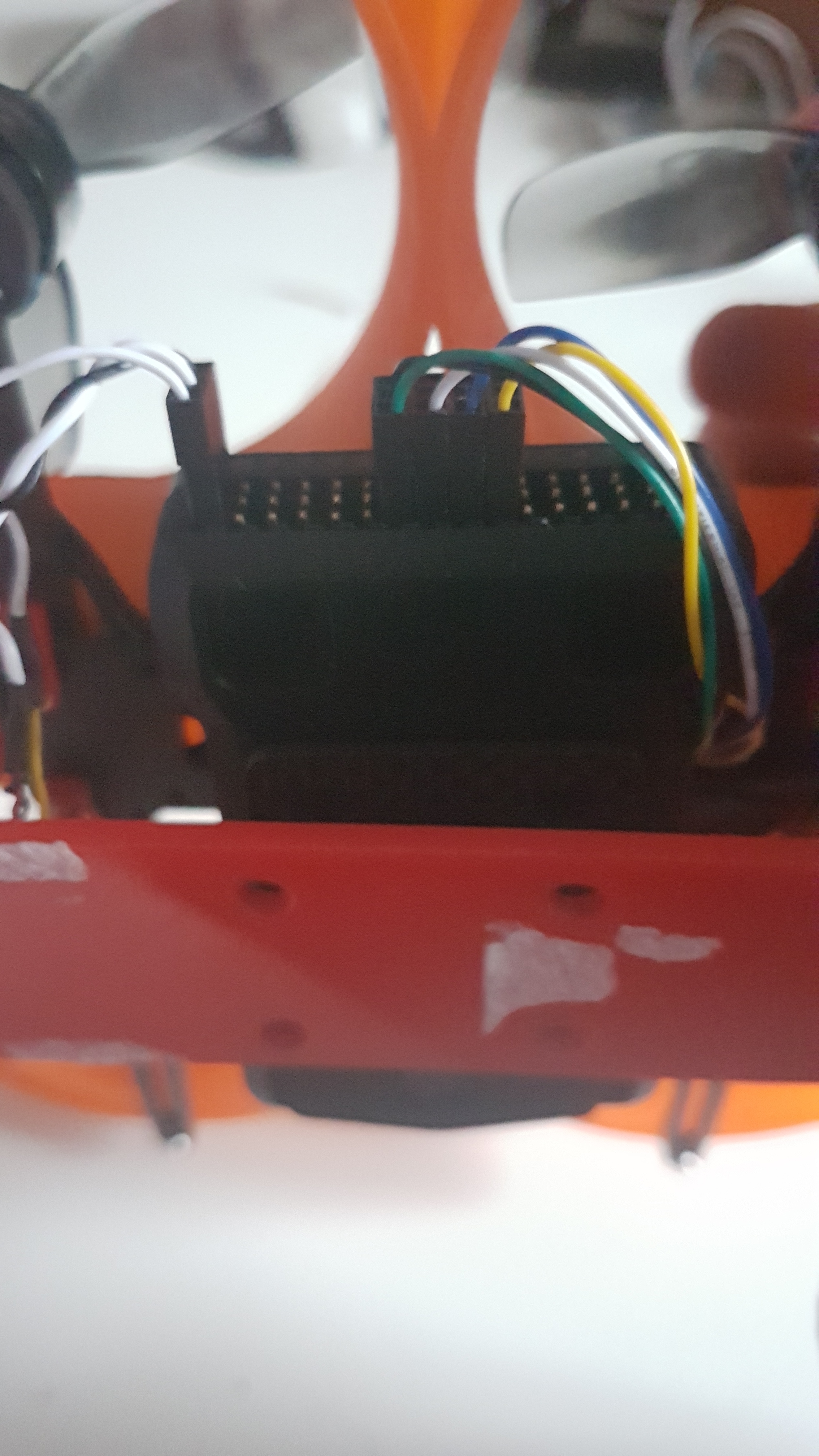
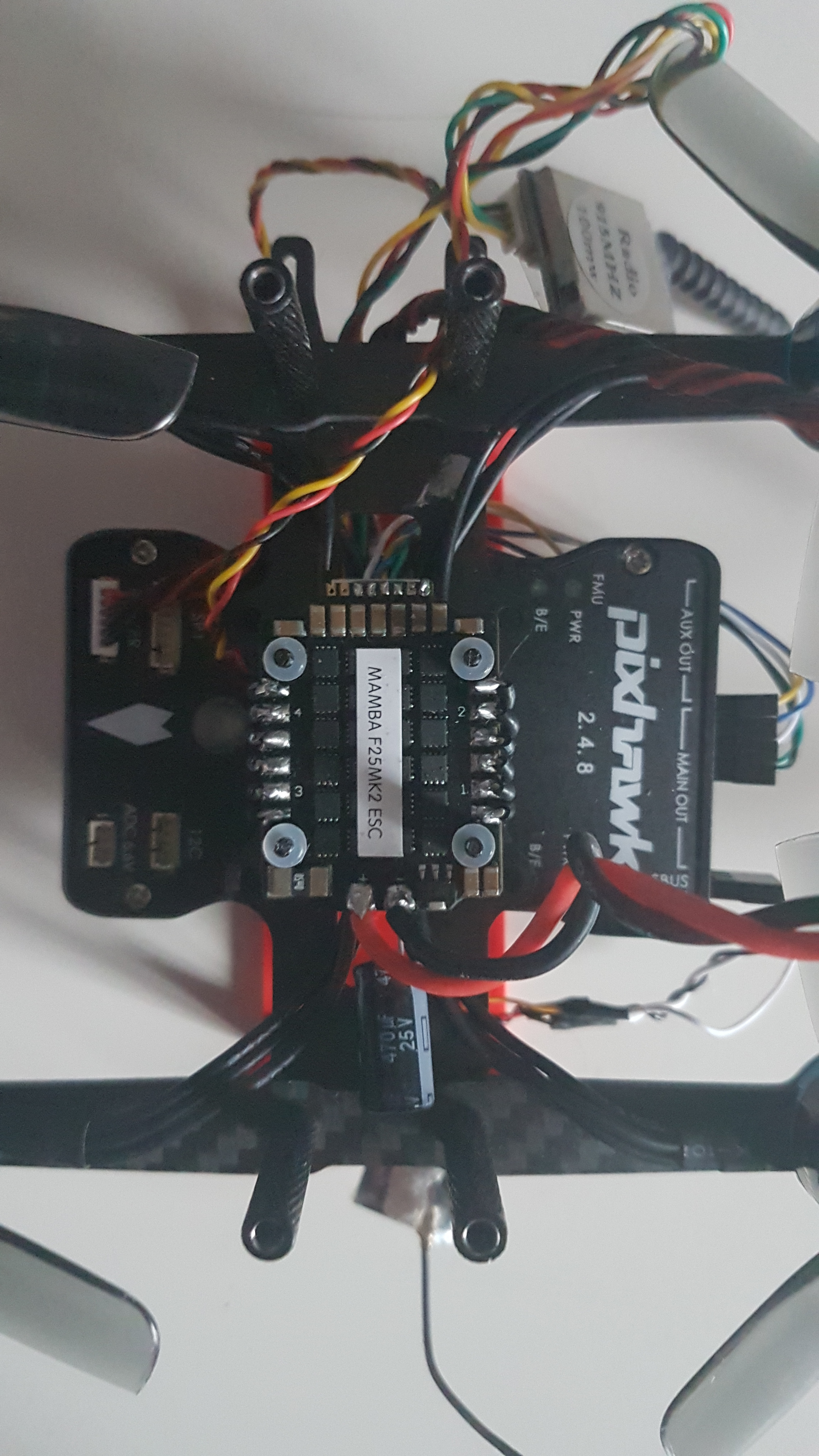
I setup my pixhawk after flashing the last firmware on it via mission planner. Then, i plugged in all the compenent, esc, arm swirch, power … (see the picture). The drone is very small but i managed to put the dumper under the pixhawk.
But when I arm it and rise the throttle, there are some very big vibrations that appears, and I can’t fly the drone correctely.
I join some picture, a video and logs for you to help me, cause I’m stuck and I really don’t know how to make it fly correctely.
Thank you for your help.
Good day, did you perform the esc calibration?
in case you didn’t perform esc calibration you must do it, you need to set first if you have escs with bheli firmware or dshot protocol
you have high vibrations on your fc and the fc its too big for the frame size… you must look for s different fc… mro pixracer r15 or, mro x2.1 with f4 mcu.
how about your battery cells and firmware? You want use px4 or ardupilot?
Check also how you have set your props…CWW and CW
I am using some 1500mah 4S battery and for the fc I am using ardupilot 4.0.2. Propellers are good in terms of CW and CCW. I am going to try the same fc on a biger frame to see if it help and I will continue to write on the post. Thank you
Hello, I came from fixed wings but, did you tryied to put three or four dampeners instead just one in the middle?
I think as I can see in the pictures you only have one dampener at the middle and the pixhawk is so big to not have a stable fix to the frame so it can induce oscilations to the accelerometers.
I hope that solve the issue
PS: I looked again to your pictures and the video, the pixhawk is receiving direct airflow from the propellers, It seems you cannot turn the controller 90º cause his size. That’s one more reason to have oscilations when the motors try to stabilize the frame causing different air speeds over the corners of the pixhawk plus the increased shaking when you hold the quad into your hand.
Hello,
Before these picture I tried with four dampener under the pixhawk but I was having the same issues. I also tried to put it directly on the frame but always the same. I am desesperate😭
Try arming the quad in a stable surface without starting the motors or accelerate them, after several seconds disarm, then look at the accelerometers data in the logfile, if you have inconsistent data may be have an issue with the accelerometers itself, try recalibrate it or reflash and start all the process from zero.
I wish you a good luck.
All values are good X and Y between +3 / -3 and Z between -15 / -5
I suppose you did it but just in case a review of the basics, direction of rotation of the motors and corresponding to the propellers, check the balance of all components.
I know it’s a tedious job but you have to eliminate possible problems
I just check all my screw, rescrew them tight, reflash the pixhawk and recalibrate it, then put new propellers and the probleme is still the same. I will trie on a bigger drone now to see if the problem is lonk to the size of the drone.
I would follow this path, I would test the motors without propellers so I can feel that there is a problem with them, then start testing the propellers one by one to verify them too, after that I suggest that instead of placing an order or buying a bigger frame, just cut piece of board and screw it all up like a test bench, then, if the vibrations disappear, suppose the problem is the size of the frame without spending so much money and time waiting for the new frame arrives
So, I already have some other frame that I use for FPV so it was easy to transfer the pixhawk on it. I first try without dampener but same problem. But then, I try with the dampener provided with the pixhawk and it look like it working without vibration. I will retry tomorrow whenever day come back. Thanks for the help.
I am glad that you are already on the way to solving the problem, you do not have to thank anything, it is gratifying to help each other among those who practice this hobby