This is my first drone project and I am starting by attempting to take a manual flight with an RC setup. I have calibrated the sensors, I have setup my RC and can arm the drone from it, and I am using QGC to see telemetry. However, my drone wont take off from the ground. It barley moves up and then it does not take off. Usually I get one 6" bounce and then I cant go any higher even at max throttle. [ the test fligth ]. I have not moved onto auto tuning because of this. The black thing mounted on the from is a 3D printed lidar mount. I have tried taking it off as well. It only weighs about 50g.
I have done some research and checked / tested the following:
Propellers and motors are setup and spinning in the right direction
The propellers are screwed on tight
Calibrated drone in an open area
used QGC actuator sliders to check that all motors spin at same RPM
Drone Specs
I am using the X650 Drone kit drone kit with the Pixhawk 6X.
I am not really sure where to go or what to try. I would think the drone should easily take off at around 50% throttle however that is not the case. I also thought a 6S battery would be enough and it is recommended in the drone Kit website linked above. Any help would be appreciated!
@dakejahl Here is a log file, I am working with a friend on the project and I believe he deleted the log from the flight video above. This is a similar log, we flew the drone in manual mode and the drone fell sideways. Flight review link
if link does not work here is a zipped ulog file that i renamed as a pdf. I zipped the file to be under 4.0 MB. log_1_2025-4-13-16-57-40.zip.pdf (1.8 MB)
The drone was unsuccessful in getting 6" in flight it seems like one inch max at the moment. I did try several times. It is still a small hop and still it seems like we lose throttle or something like that.
Hmm I don’t see anything obviously wrong. Are you using dshot? I also see you have esc telemetry configured but I don’t see esc_rpm or current in the log. Having a battery monitor (power module with i2c hooked up) would help troubleshoot the issue. Are you sure the props are installed in the correct location and the motors are spinning in the correct direction?
@dakejahl Yes I am sure about the motors and props. I am currently using dshot600. I am currently trying to set up the ESC telemetry. Right now I am running into an error that says “packet length mismatch (64 !=15) so I am working through that at the moment. (Help would be appreciated haha). I will look into finding a battery monitor and take your advice thank you.
@dakejahl I was able to do a couple flight tests, 2 autonomous ones and a position control flight.
on these flights the drone did its usual 1 hop and then nothing else really, the position control flight did not do a big hop but lots of small bounces.
I will attach logs, but I only have one video for autonomous flight.
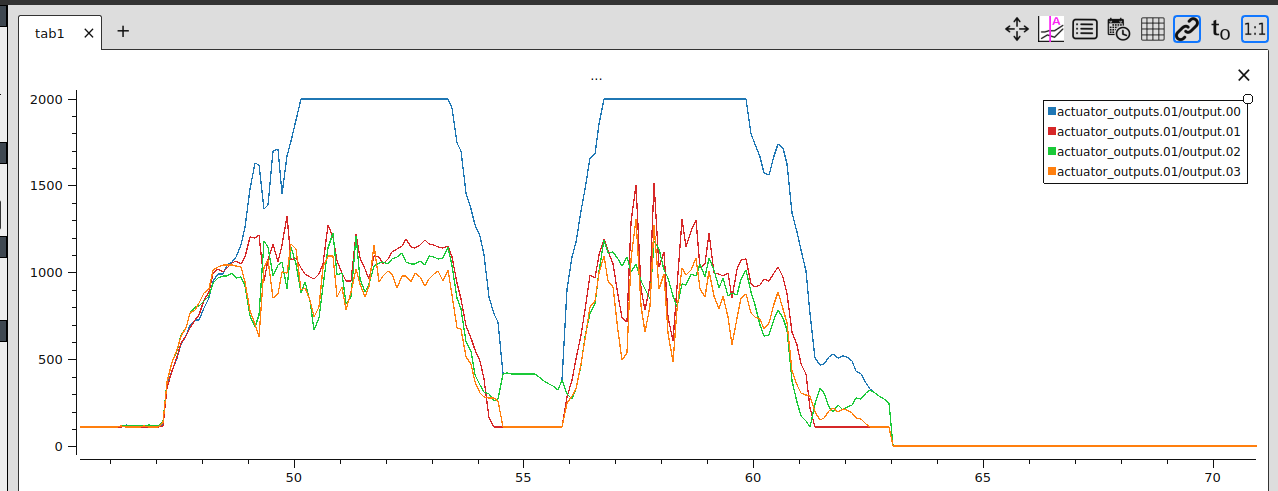
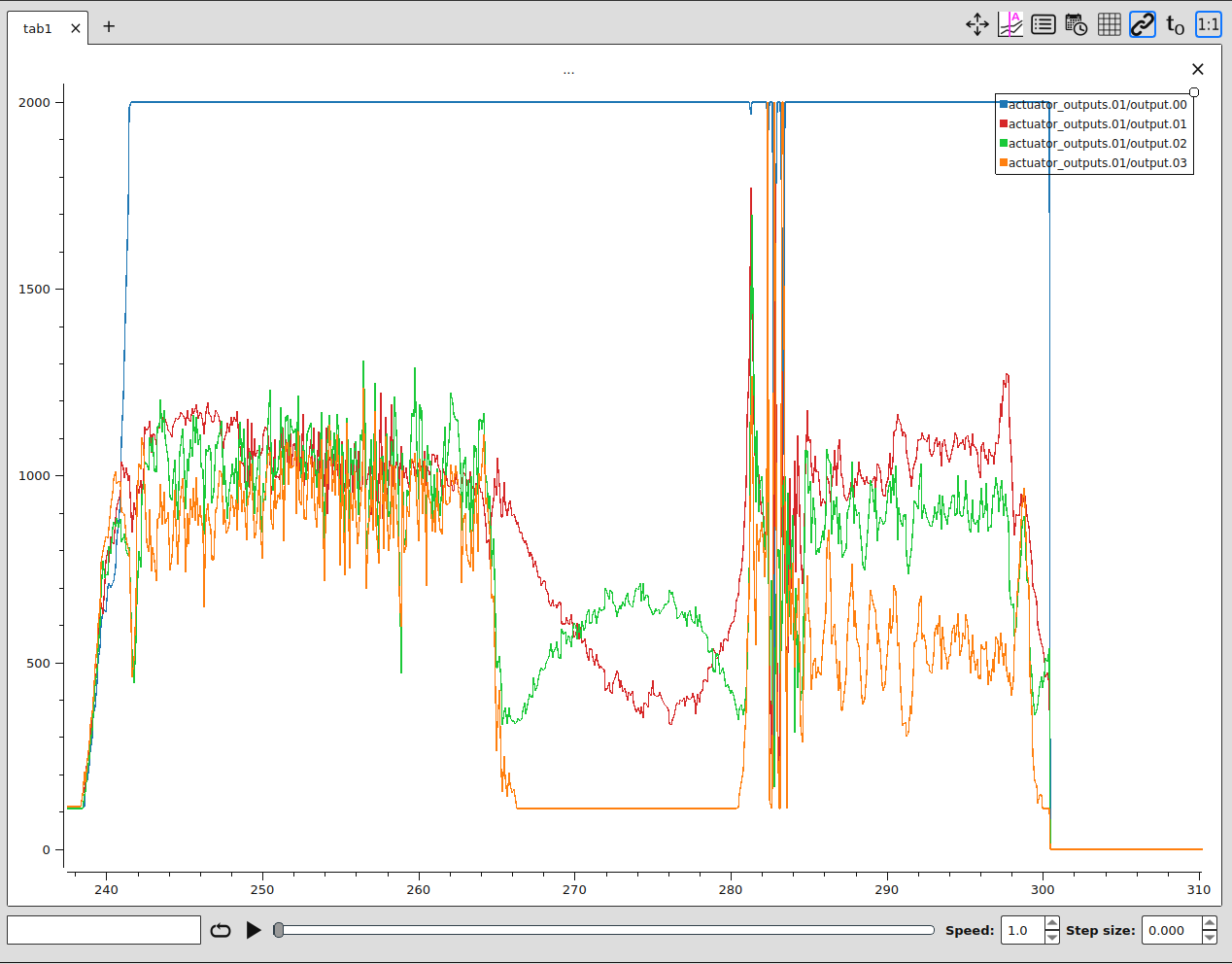
Something is wrong with Motor 1. The flight controller is commanding full throttle on that motor yet it is not spinning up. As you can see in the video the vehicle tilts towards motor 1. If the ESCs support dshot telemetry you should hook it up. I would test each motor through the full range (0 to 100 throttle) to validate the ESC/motor works through the full output range. You could also flash Ardupilot and use ESC passthrough to check the ESC firmware settings using BLHeli Configurator / AM32 Configurator (depending on which ESC FW you’re running). It might be the case that the ESC on Motor1 is misconfigured, either wrong KV/pole settings or otherwise.
@dakejahl First I just want to say thank you for your continued help. The things you have mentioned I have already tried to some degree. In order to keep my original Post short I did not mention it but it might be worth mentioning it now.
I performed some bench testing using the actuator control on QGC and the on mavlink shell on QGC in both cases each of the motors is able to spin up to 10,000 rpm. I think that is what you are talking about when you say “I would test each motor through the full range (0 to 100 throttle) to validate the ESC/motor works through the full output range”.
I did not use the ardupilot pass-through like you mentions but I did do a arduino one-wire connection with am32 instructions to my esc to configure and check the KV and pole #. Currently I have them set for 340KV and 24 poles which to my understanding is the motors in the X650 kit are rated for.
Lastly I did try to set up the ESC telemetry and maybe you can help me with that too. I ran into and error where I got “ERROR [dshot] Packet length mismatch (64 != 15)”. I was following Telem intrucstions. I could not find a lot of documentation to set it up so maybe I had the wires wrong or something but i have not gotten that to work either.
Do you think it could be an issue with my FC for some reason?
Hmm how do the solder joints on the ESC look? Regarding the bench test – did you test with props attached? It might work fine without props, and then once props are attached fail to get up to speed. Basically I would look to verify that ESC on Motor1 is able to achieve full throttle RPM with a prop attached during a bench test (might need to build a motor/prop test stand, or rig some way to bolt the drone to the ground). I would double check the ESCs with AM32 Configurator to be 100% certain the firmware version and settings are the same across all 4 ESCs. I would also try updating to the latest AM32 firmware to see if it helps. I don’t think it’s an issue with the FC, I think there’s a problem with the ESC/motor but not sure what or why.
@dakejahl Hello I was able to make the drone fly now!
I tried looking back at the AM32 website app that you and I mention above, and getting it to work instead of using the Arduino method. I was able to get it to work. The advantage of using the website ESC configuration tool was that I was able to see the Firmware version and software name. For some reason our ESCs were split between WRAITH32 and Tekko32 firmware. I changed all the WRAITH32 ones to Tekko32 and made sure all configuration settings such as KV and pole # were correct. After doing this the drone was able to fly.