When working through the controller calibration, we get all the way until it is time to input the down pitch motion. The up pitch motion is recognized, but the calibration just won’t recognize that the pitch is in the full down position. The controller has no offset or trim, and has the range at 100%. What should we do?
The photo shows the QGroundControl Screen and the remote in the down stick position.
Thanks for replying. all outputs are + or - 100%. This is a new model. We’re using a FrSky X8R receiver. I’m not sure what you mean by binding protocol. We connected the receiver to the PX4 using the SBUS port/protocol.
What we find strange is that all of the prior channels (throttle, rudder, roll/ailerons) work fine (i.e. are detected OK by the QGroundControl calibration) for the calibration steps but when we get to elevator, the “full up” is detected fine but the “full down” isn’t.
Any thoughts about how to diagnose this? The QGroundControl calibration seems to be mandatory, but, I don’t see anywhere in the software where we can do a manual calibration…
That is weird. I use the same Rx and Q X7 Tx with TAER Input and Mixer sequence. So in the Input or Mixer pages, none of your channels have any Expo or Offset or anything like that, right?
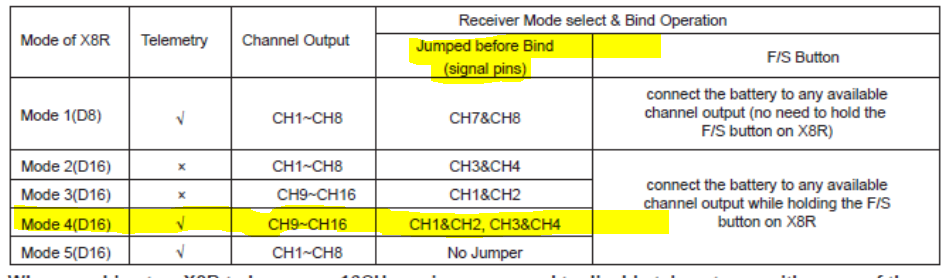
This is the binding protocol I was talking about (see below). Jumpers on the Rx Signal Pins 1&2 and 3&4 then binding the Tx in D16.
The only other thing I can think of is perform stick calibrations on your Tx then try the calibration with QGC.
OK: Started with a new model on the TX, bound the new model to the RX, didn’t change a thing on the channels or expos or anything, and… presto it worked. Thanks.