Hi.
In QGC’s PID tune, I can perform PID tune and confirm realtime graph.
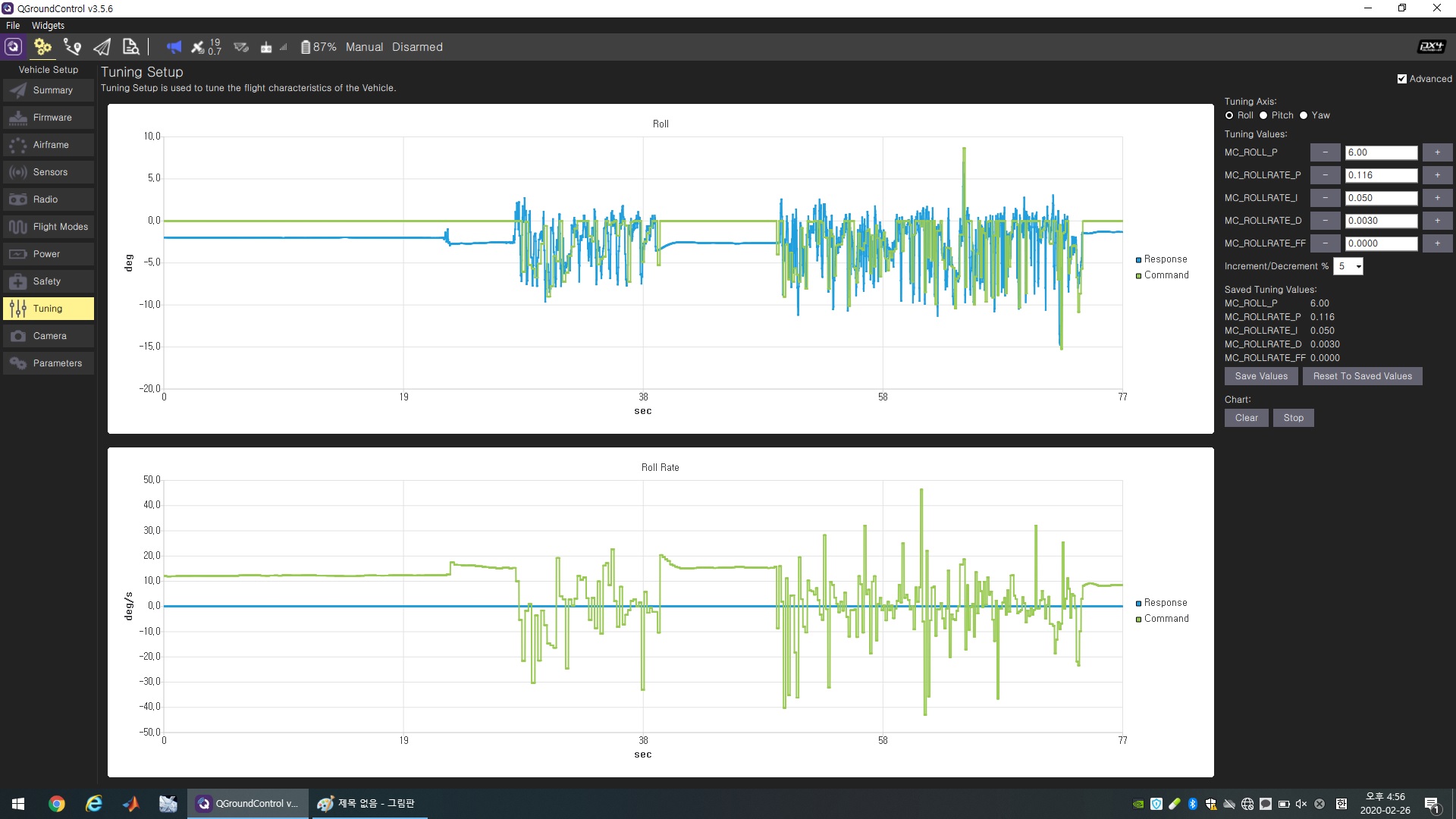
But. in Graph, I can not fine Rate Response.
how can I see Response of Attitude Rate in realtime graph?
1 Like
Not sure I understood your question correctly. The attitude rate setpoint and response is the lower graph right?
You probably mean why it stays zero. Was this screenshot taken in flight?
Can you check with an armed vehicle (maybe just on the ground without propellers)?
I can check tomorrow if the response is also sent while disarmed. I think it’s desired.
Thank you for your reply.
That graph was captured in flight.
So, that rate response was zero is not correct.
and. i found that when i connect pixhawk to computer by cable, all graph indicate correctly.
so i think this problem is related with telemetry. but i dont know what telemetry problem.
so i think this problem is related with telemetry. but i dont know what telemetry problem.
Interesting, good finding! So can you check if through your telemetry setup you get the MAVLink message ATTITUDE_TARGET streamed. It contains that data shown in the plot e.g. body_roll_rate. If that message is not streamed to save badnwidth or because the link is overloaded then the plot will not be updated.
Thank you for your reply.
I also think that it is caused by telemetry or MAVLink setting.
As you say, I tried to find message ATTITUDE_TARGET but i couldn’t.
would you tell me how i can set body_roll_rate streamed?