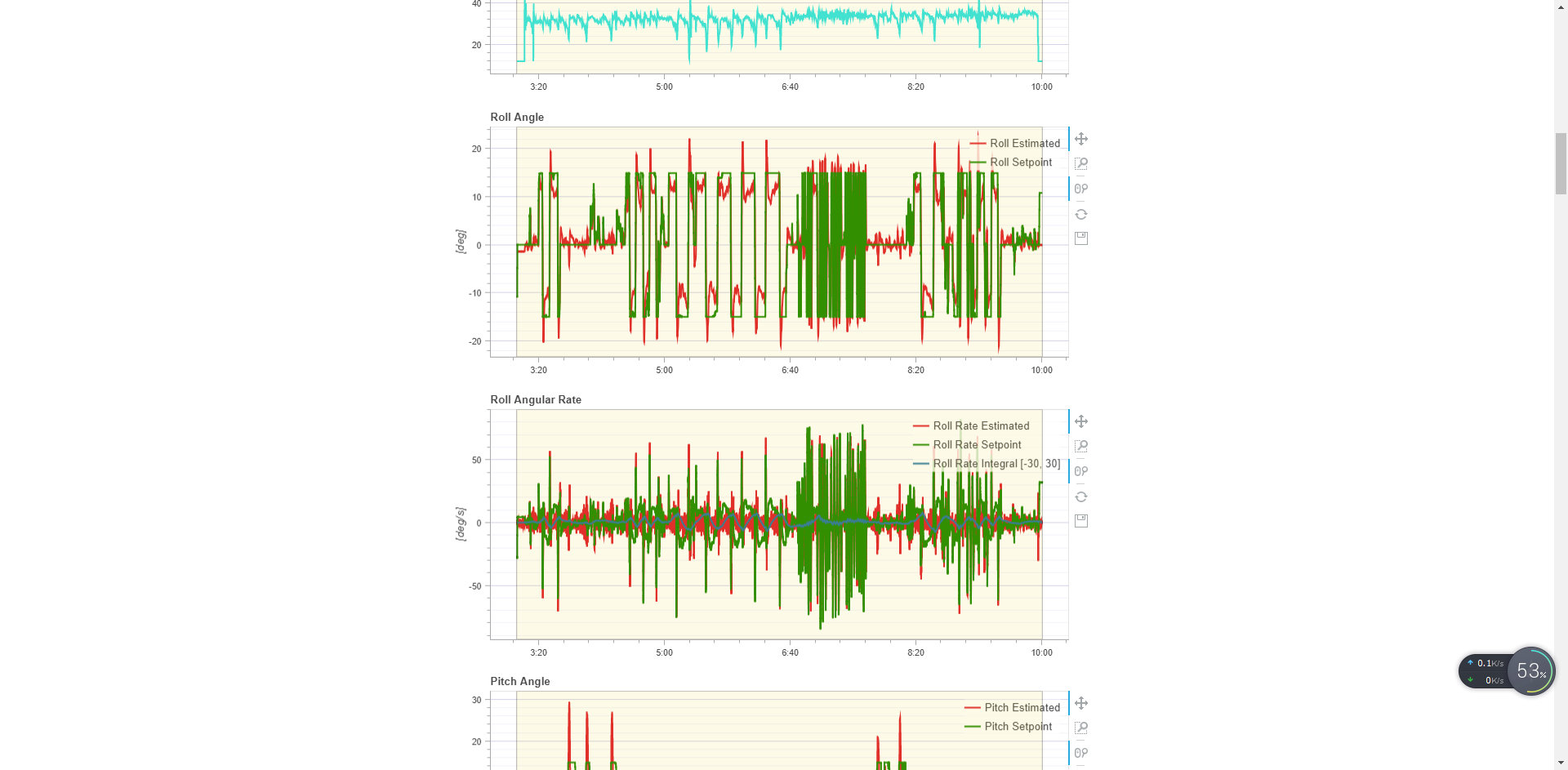
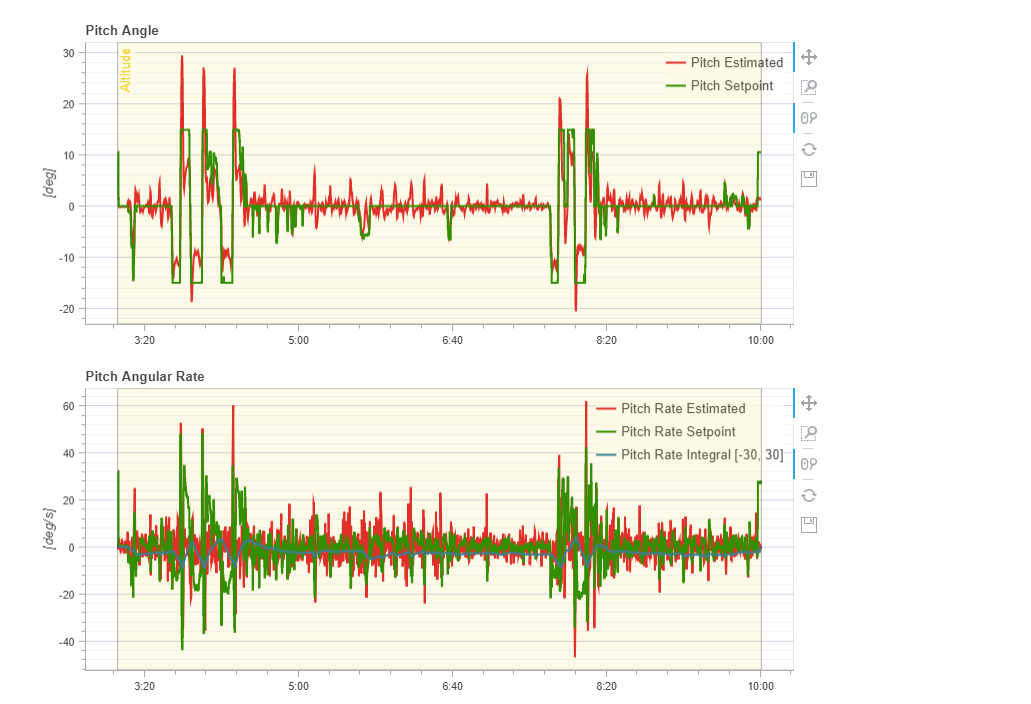
Hello ,i met a problem about the PID tuning.The action i do like this: first put the pitch jostick full forward a little time,the plane go head ,then i put the pitch joystick full back,and go center when the plane stop. But i found the plane Brake angle bigger than 20 deg(i set the max angle in air to 20).
Hi @1163666780 ,
There is definitely a tuning problem (possibly in the rate controller, but I would need to zoom a bit in the graphs). Could you share the URL link of the log please?
Full brake make the plane Concussion and the angle be bigger than I limit. I had try to change the value THD_MDL_AFC from 0 to 0.3,0.4 and 0.5,it make the joystick be slow around the center,so i make it back to zero.
sure,sorry i forgot that.
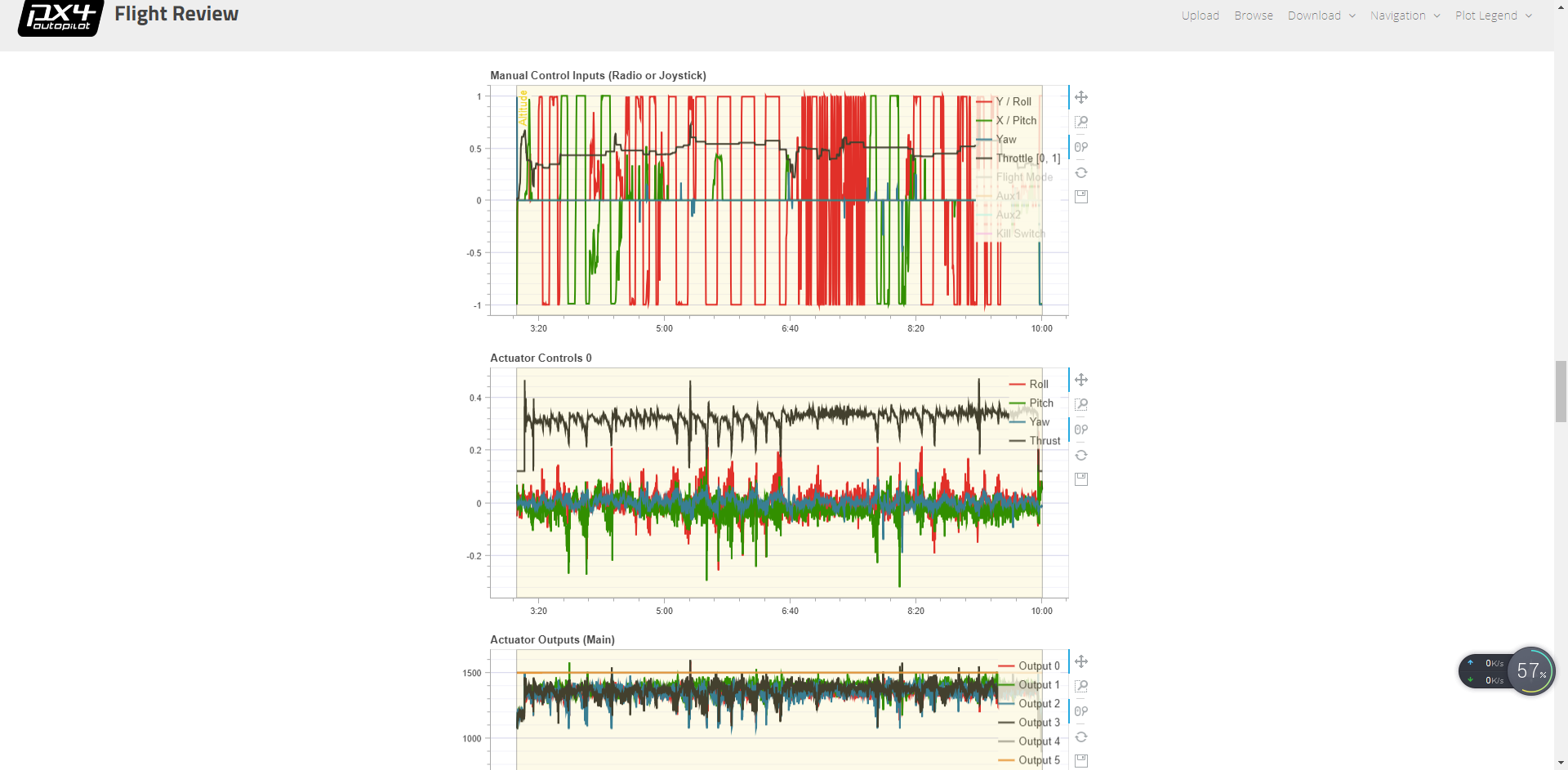
this is the url:
https://logs.px4.io/plot_app?log=f919e400-6b0d-49f0-a708-fdbe882ab03f1
Thanks and best wishes
Hi, your overshoot in attitude is due to improper tuning of the rate loops. You need to change the PID rate gains and you also might need to lower the gyro cutoff frequency `IMU_GYRO_CUTOFF’ (in Hz).
Thanks for your reply.
I will try to change the parameters.
And why should i change the value IMU_GYRO_CUTOFF?