Hi,
We are experiencing crash landings due to the drone (a custom built quadcopter) ascending unexpectedly and suddenly in the offboard mode.
The logs of this flight can be found here: https://review.px4.io/plot_app?log=171ed389-65aa-4d28-95c1-30fcd25e26e2
The drone does not utilize a GPS (as a design), hence the inaccurate time and date of the logs. An ARK Flow optical flow & distance sensor is being used for the position data.
The pilot took the control at the time the drone launched itself with too much thrust (actuators at 1.0). The reason of the free-fall/crash landing might be the pilot not giving enough thrust to hover in the stabilized flight mode.
The drone takes-off with a NED-based movement setpoint (current-x, current-y, 0.8m-z with the current-heading for yaw stabilization).
The drone can sometimes recover itself from this unexpected and sudden ascend/launch after the take-off. The anomaly does not happen in every flight.
The MAVSDK is running on an Android device, connected to a Raspberry Pi Zero 2 W via Wi-Fi, connected to the Pixhawk via USB.
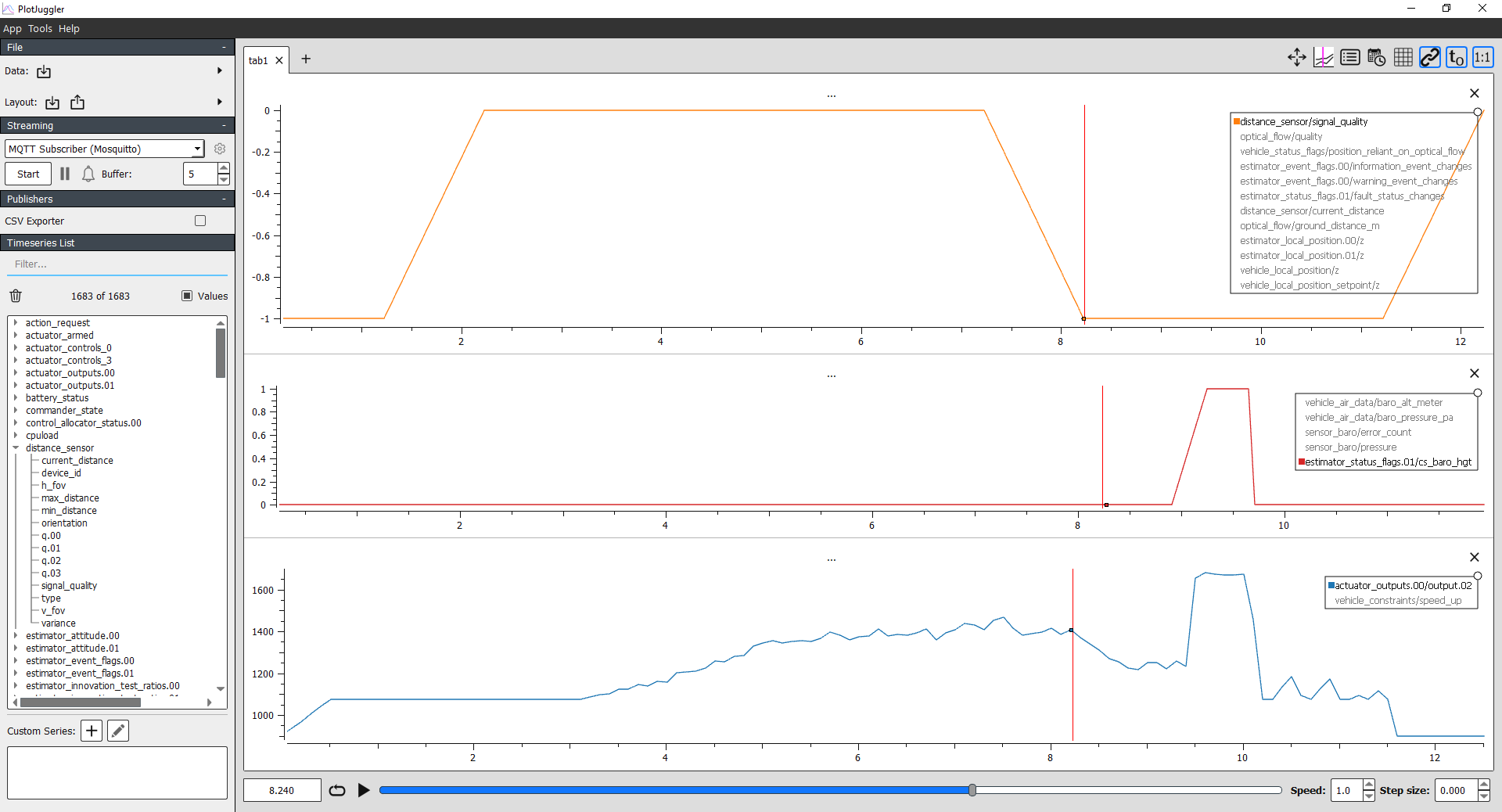
We could not find enough meaningful pattern to find the source of the issue at the moment. We are focusing on the optical flow-distance sensor (distance_sensor/signal_quality goes to -1, optical_flow/quality goes down etc.). We are still trying to troubleshoot the issue. Any inputs and advices are welcome.
Thanks in advance.
Hello
We have had a similar experience when doing non-GPS flight with sudden changes in height. The issue for us seemed to be related to the changeover from primary height sensor (for us VIO, for you distance sensor) to barometer.
Looking at your flight logs, you can see that estimator status flags switch from range sensor to baro at around the same time as maximum thrust (estimator_status.cs_rng_hgt goes to 0, estimator_status.cs_baro_hgt goes to 1)
Although you should keep trying to see why your range sensor drops out, I would suggest also trying to upgrade to v1.14 - the new version has much better support for multiple height sensors in the EKF, and if configured correctly you shouldn’t see the sudden change when there is a switchover from range sensor to baro.
Thanks for the information and advice.
The distance sensor’s signal quality going down might have triggered those flag changes (to barometer), even though the distance sensor readings looks fine.
We are going to try to replace the ARK Flow with a spare one. The current sensor might have got some damages from the previous crashes.
We are also going to try to adjust the barometer for our region, if it switches to it, we should be able to avoid an unexpected, sudden jump/ascend.
We are holding for the 1.14 switch. We had some critical issues with the new failsafe system and switching to RC control in case of an emergency. We need to investigate those further at some point.
Seems like the PX4 1.14 version fixed the issue for us.